Enforce flatcache off when using micro particle systems |
||
|---|---|---|
| .github/workflows | ||
| .overrides | ||
| docker | ||
| docs | ||
| omnigibson | ||
| scripts | ||
| tests | ||
| .dockerignore | ||
| .gitattributes | ||
| .gitignore | ||
| .gitmodules | ||
| .pre-commit-config.yaml | ||
| LICENSE | ||
| MANIFEST.in | ||
| README.md | ||
| mkdocs.yml | ||
| pyproject.toml | ||
| requirements-dev.txt | ||
| setup.py | ||
README.md

 OmniGibson
OmniGibson
![]()

![]()
Need support? Join our Discord!

Latest Updates
-
[10/01/24] v1.1.0: Major improvements, stability fixes, pip installation, and much more! [release notes]
-
[03/17/24] v1.0.0: First full release with 1,004 pre-sampled tasks, all 50 scenes, and many new objects! [release notes]
-
[08/04/23] v0.2.0: More assets! 600 pre-sampled tasks, 7 new scenes, and many new objects 📈 [release notes]
-
[04/10/23] v0.1.0: Significantly improved stability, performance, and ease of installation 🔧 [release notes]
OmniGibson is a platform for accelerating Embodied AI research built upon NVIDIA's Omniverse platform, featuring:
- 📸 Photorealistic Visuals and 📐 Physical Realism
- 🌊 Fluid and 👕 Soft Body Support
- 🏔️ Large-Scale, High-Quality Scenes and 🎾 Objects
- 🌡️ Dynamic Kinematic and Semantic Object States
- 🤖 Mobile Manipulator Robots with Modular ⚙️ Controllers
- 🌎 OpenAI Gym Interface
Check out OmniGibson's documentation to get started!
Citation
If you use OmniGibson or its assets and models, please cite:
@inproceedings{
li2022behavior,
title={{BEHAVIOR}-1K: A Benchmark for Embodied {AI} with 1,000 Everyday Activities and Realistic Simulation},
author={Chengshu Li and Ruohan Zhang and Josiah Wong and Cem Gokmen and Sanjana Srivastava and Roberto Mart{\'\i}n-Mart{\'\i}n and Chen Wang and Gabrael Levine and Michael Lingelbach and Jiankai Sun and Mona Anvari and Minjune Hwang and Manasi Sharma and Arman Aydin and Dhruva Bansal and Samuel Hunter and Kyu-Young Kim and Alan Lou and Caleb R Matthews and Ivan Villa-Renteria and Jerry Huayang Tang and Claire Tang and Fei Xia and Silvio Savarese and Hyowon Gweon and Karen Liu and Jiajun Wu and Li Fei-Fei},
booktitle={6th Annual Conference on Robot Learning},
year={2022},
url={https://openreview.net/forum?id=_8DoIe8G3t}
}
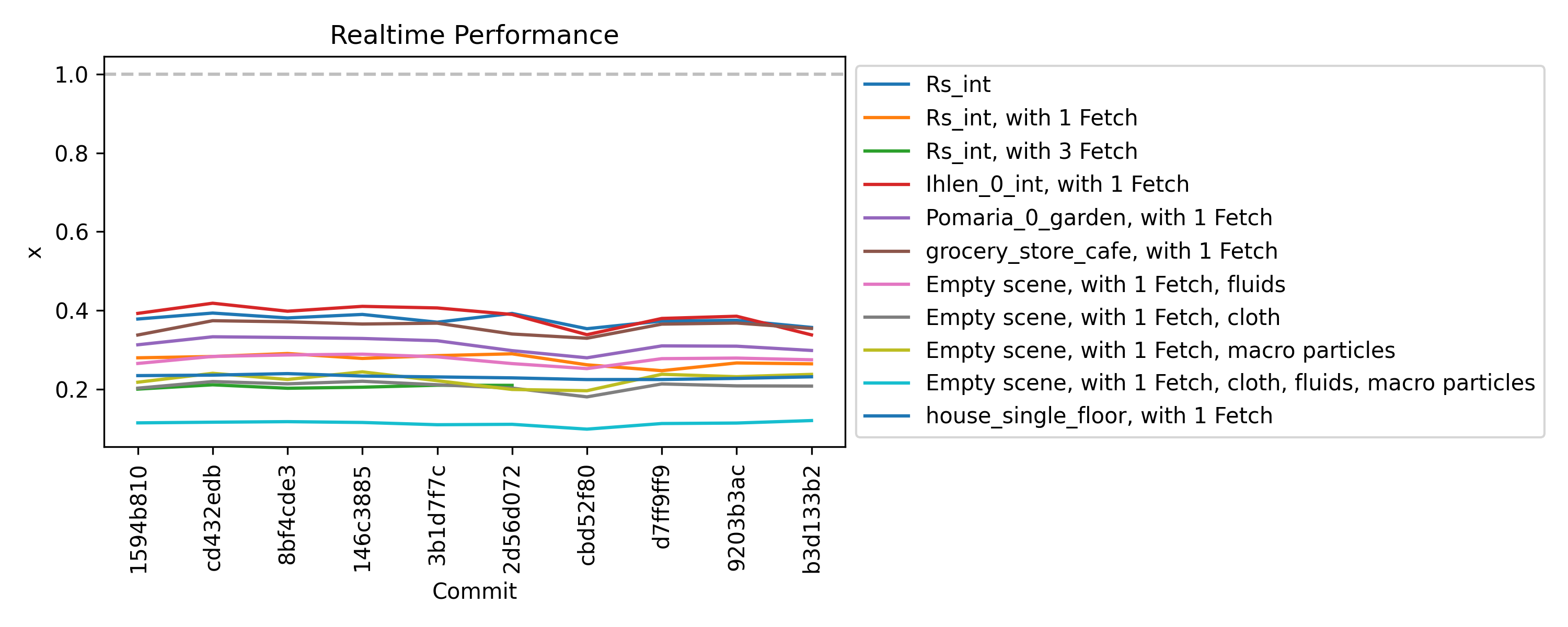
Profiling
Click on the plot to access our profiling page with more examples.