Compare commits
12 Commits
enginechan
...
master
| Author | SHA1 | Date |
|---|---|---|
|
|
f56bb1904e | |
|
|
362b36a40d | |
|
|
2e301ed899 | |
|
|
2c84627b8f | |
|
|
e9f0d676fd | |
|
|
efed534ba9 | |
|
|
3558c79ffe | |
|
|
1c28990df2 | |
|
|
d32a163e98 | |
|
|
d76a53e8ef | |
|
|
8c5af7ccf1 | |
|
|
a697ec5e01 |
|
|
@ -1,3 +0,0 @@
|
|||
# Default ignored files
|
||||
/shelf/
|
||||
/workspace.xml
|
||||
|
|
@ -1,12 +0,0 @@
|
|||
<?xml version="1.0" encoding="UTF-8"?>
|
||||
<module type="PYTHON_MODULE" version="4">
|
||||
<component name="NewModuleRootManager">
|
||||
<content url="file://$MODULE_DIR$" />
|
||||
<orderEntry type="inheritedJdk" />
|
||||
<orderEntry type="sourceFolder" forTests="false" />
|
||||
</component>
|
||||
<component name="PyDocumentationSettings">
|
||||
<option name="format" value="PLAIN" />
|
||||
<option name="myDocStringFormat" value="Plain" />
|
||||
</component>
|
||||
</module>
|
||||
|
|
@ -1,13 +0,0 @@
|
|||
<component name="InspectionProjectProfileManager">
|
||||
<profile version="1.0">
|
||||
<option name="myName" value="Project Default" />
|
||||
<inspection_tool class="PyUnresolvedReferencesInspection" enabled="true" level="WARNING" enabled_by_default="true">
|
||||
<option name="ignoredIdentifiers">
|
||||
<list>
|
||||
<option value="runtest.ImageEditorPage" />
|
||||
<option value="ImageEditorPage" />
|
||||
</list>
|
||||
</option>
|
||||
</inspection_tool>
|
||||
</profile>
|
||||
</component>
|
||||
|
|
@ -1,6 +0,0 @@
|
|||
<component name="InspectionProjectProfileManager">
|
||||
<settings>
|
||||
<option name="USE_PROJECT_PROFILE" value="false" />
|
||||
<version value="1.0" />
|
||||
</settings>
|
||||
</component>
|
||||
|
|
@ -1,4 +0,0 @@
|
|||
<?xml version="1.0" encoding="UTF-8"?>
|
||||
<project version="4">
|
||||
<component name="ProjectRootManager" version="2" project-jdk-name="Python 3.7 (Palette)" project-jdk-type="Python SDK" />
|
||||
</project>
|
||||
|
|
@ -1,8 +0,0 @@
|
|||
<?xml version="1.0" encoding="UTF-8"?>
|
||||
<project version="4">
|
||||
<component name="ProjectModuleManager">
|
||||
<modules>
|
||||
<module fileurl="file://$PROJECT_DIR$/.idea/SeAIPalette.iml" filepath="$PROJECT_DIR$/.idea/SeAIPalette.iml" />
|
||||
</modules>
|
||||
</component>
|
||||
</project>
|
||||
|
|
@ -1,6 +0,0 @@
|
|||
<?xml version="1.0" encoding="UTF-8"?>
|
||||
<project version="4">
|
||||
<component name="VcsDirectoryMappings">
|
||||
<mapping directory="$PROJECT_DIR$" vcs="Git" />
|
||||
</component>
|
||||
</project>
|
||||
|
|
@ -2,8 +2,10 @@
|
|||
|
||||
# Form implementation generated from reading ui file 'MainWindow_map.ui'
|
||||
#
|
||||
# Created by: PyQt5 UI code generator 5.12.3
|
||||
# WARNING! All changes made in this file will be lost!
|
||||
# Created by: PyQt5 UI code generator 5.15.1
|
||||
#
|
||||
# WARNING: Any manual changes made to this file will be lost when pyuic5 is
|
||||
# run again. Do not edit this file unless you know what you are doing.
|
||||
|
||||
|
||||
from PyQt5 import QtCore, QtGui, QtWidgets
|
||||
|
|
@ -94,9 +96,6 @@ class Ui_MainWindow(object):
|
|||
self.horizontalLayout.addLayout(self.formLayout_2)
|
||||
self.verticalLayout_2 = QtWidgets.QVBoxLayout()
|
||||
self.verticalLayout_2.setObjectName("verticalLayout_2")
|
||||
self.pushButton_2 = QtWidgets.QPushButton(self.centralwidget)
|
||||
self.pushButton_2.setObjectName("pushButton_2")
|
||||
self.verticalLayout_2.addWidget(self.pushButton_2)
|
||||
self.pushButton_run = QtWidgets.QPushButton(self.centralwidget)
|
||||
font = QtGui.QFont()
|
||||
font.setFamily("宋体")
|
||||
|
|
@ -111,13 +110,6 @@ class Ui_MainWindow(object):
|
|||
self.pushButton_stop.setFont(font)
|
||||
self.pushButton_stop.setObjectName("pushButton_stop")
|
||||
self.verticalLayout_2.addWidget(self.pushButton_stop)
|
||||
self.pushButton = QtWidgets.QPushButton(self.centralwidget)
|
||||
font = QtGui.QFont()
|
||||
font.setFamily("宋体")
|
||||
font.setPointSize(12)
|
||||
self.pushButton.setFont(font)
|
||||
self.pushButton.setObjectName("pushButton")
|
||||
self.verticalLayout_2.addWidget(self.pushButton)
|
||||
self.horizontalLayout.addLayout(self.verticalLayout_2)
|
||||
self.horizontalLayout.setStretch(0, 1)
|
||||
self.horizontalLayout.setStretch(1, 1)
|
||||
|
|
@ -157,8 +149,6 @@ class Ui_MainWindow(object):
|
|||
self.label_9.setText(_translate("MainWindow", "移动节点电池容量"))
|
||||
self.lineEdit_bettery.setText(_translate("MainWindow", "100"))
|
||||
self.label_4.setText(_translate("MainWindow", "算法选择"))
|
||||
self.pushButton_2.setText(_translate("MainWindow", "关于我们"))
|
||||
self.pushButton_run.setText(_translate("MainWindow", "运行"))
|
||||
self.pushButton_stop.setText(_translate("MainWindow", "停止"))
|
||||
self.pushButton.setText(_translate("MainWindow", "退出程序"))
|
||||
self.label_show.setText(_translate("MainWindow", "<html><head/><body><p><br/></p></body></html>"))
|
||||
|
|
|
|||
|
|
@ -157,13 +157,6 @@
|
|||
</item>
|
||||
<item>
|
||||
<layout class="QVBoxLayout" name="verticalLayout_2">
|
||||
<item>
|
||||
<widget class="QPushButton" name="pushButton_2">
|
||||
<property name="text">
|
||||
<string>关于我们</string>
|
||||
</property>
|
||||
</widget>
|
||||
</item>
|
||||
<item>
|
||||
<widget class="QPushButton" name="pushButton_run">
|
||||
<property name="font">
|
||||
|
|
@ -190,19 +183,6 @@
|
|||
</property>
|
||||
</widget>
|
||||
</item>
|
||||
<item>
|
||||
<widget class="QPushButton" name="pushButton">
|
||||
<property name="font">
|
||||
<font>
|
||||
<family>宋体</family>
|
||||
<pointsize>12</pointsize>
|
||||
</font>
|
||||
</property>
|
||||
<property name="text">
|
||||
<string>退出程序</string>
|
||||
</property>
|
||||
</widget>
|
||||
</item>
|
||||
</layout>
|
||||
</item>
|
||||
</layout>
|
||||
|
|
|
|||
|
|
@ -12,6 +12,7 @@ class Charge(WildFire):
|
|||
|
||||
def step(self, state, info):
|
||||
if not self.empty():
|
||||
# if there're actions to do
|
||||
action = self.actions_to_do[0]
|
||||
del self.actions_to_do[0]
|
||||
return action, None
|
||||
|
|
|
|||
|
|
@ -23,6 +23,9 @@ class MultiBoustrophedon(Boustrophedon):
|
|||
self.charges = charges
|
||||
self.finished_idx = [False for _ in range(ship_num)]
|
||||
|
||||
#self.ship_energy = ship_energy
|
||||
#self.current_ship_energy = [ship_energy for _ in range(self.ship_num)]
|
||||
|
||||
self.delta_x = (0, 0, 1, -1, ) # 1, 1, -1, -1)
|
||||
self.delta_y = (1, -1, 0, 0, ) # 1, -1, 1, -1)
|
||||
|
||||
|
|
|
|||
|
|
@ -43,6 +43,8 @@ class MultiGreedy(Boustrophedon):
|
|||
if self.charges[i].empty():
|
||||
redecide_directions[i] = True
|
||||
continue
|
||||
|
||||
# Decide whether charge or not
|
||||
first_charge_act, charge_len = self.charges.step(state, info, i)
|
||||
if first_charge_act == FINISHED:
|
||||
self.finished_idx[i] = True
|
||||
|
|
|
|||
|
|
@ -18,10 +18,13 @@ class MultiSpiral(Spiral):
|
|||
):
|
||||
super().__init__()
|
||||
self.ship_num = ship_num
|
||||
# self.dest_direction = [None for _ in range(ship_num)]
|
||||
self.wildfires = wildfires
|
||||
self.charges = charges
|
||||
self.finished_idx = [False for _ in range(ship_num)]
|
||||
|
||||
#self.ship_energy = ship_energy
|
||||
#self.current_ship_energy = [ship_energy for _ in range(self.ship_num)]
|
||||
|
||||
self.delta_x = [0, 0, 1, -1, 1, 1, -1, -1]
|
||||
self.delta_y = [1, -1, 0, 0, 1, -1, 1, -1]
|
||||
|
|
|
|||
|
|
@ -149,6 +149,7 @@ class Spiral(object):
|
|||
"""
|
||||
return _turn(direction)
|
||||
else:
|
||||
# print(f'not turn')
|
||||
return direction
|
||||
|
||||
def step(self, state, info):
|
||||
|
|
|
|||
|
|
@ -7,8 +7,8 @@ class WildFire(object):
|
|||
def __init__(self):
|
||||
super().__init__()
|
||||
self.actions_to_do = []
|
||||
self.delta_x = (0, 0, 1, -1, )
|
||||
self.delta_y = (1, -1, 0, 0, )
|
||||
self.delta_x = (0, 0, 1, -1, ) # 1, 1, -1, -1)
|
||||
self.delta_y = (1, -1, 0, 0, ) # 1, -1, 1, -1)
|
||||
|
||||
@ staticmethod
|
||||
def _is_valid_index(index, an_array):
|
||||
|
|
@ -23,9 +23,12 @@ class WildFire(object):
|
|||
|
||||
def step(self, state, info):
|
||||
if not self.empty():
|
||||
# if there're actions to do
|
||||
action = self.actions_to_do[0]
|
||||
del self.actions_to_do[0]
|
||||
return [action]
|
||||
|
||||
# print(state)
|
||||
x, y, _ = state
|
||||
fields = info['fields']
|
||||
|
||||
|
|
@ -46,6 +49,7 @@ class WildFire(object):
|
|||
visited[next_x, next_y] = True
|
||||
next_node = Node(next_x, next_y, cur_node)
|
||||
if fields[next_x, next_y] == 0:
|
||||
# not visited
|
||||
node = next_node
|
||||
while node.direction is not None:
|
||||
self.actions_to_do.append(node.direction)
|
||||
|
|
|
|||
|
|
@ -29,7 +29,7 @@ class SeaEnvEngine(object):
|
|||
ship_radius: int,
|
||||
ship_velocity: int,
|
||||
|
||||
sonar_spread_times: int,
|
||||
sonar_spread_times: int, # the number of sonar detection points
|
||||
|
||||
obstacles: dict,
|
||||
|
||||
|
|
@ -38,7 +38,7 @@ class SeaEnvEngine(object):
|
|||
show_fields: bool = True,
|
||||
|
||||
init_ships: bool = True,
|
||||
start_position=None,
|
||||
start_position=None, # [start_x, start_y]
|
||||
start_r=None,
|
||||
|
||||
time_click: float = 1.0/10.0,
|
||||
|
|
@ -57,8 +57,8 @@ class SeaEnvEngine(object):
|
|||
|
||||
self.max_angle, self.min_angle = None, None
|
||||
|
||||
|
||||
self.crashed = False
|
||||
# basic params
|
||||
self.crashed = False # whether or not crash into an obstacle or bound
|
||||
self.finished = False
|
||||
self.terminate = False
|
||||
|
||||
|
|
@ -100,9 +100,12 @@ class SeaEnvEngine(object):
|
|||
self.ship_img = pygame.transform.scale(
|
||||
self.ship_img, (self.ship_radius * 4, self.ship_radius * 4))
|
||||
""" 2. init gymunk """
|
||||
# physics stuff
|
||||
self.space = pymunk.Space()
|
||||
self.space.gravity = pymunk.Vec2d(0., 0.)
|
||||
|
||||
# create bounds
|
||||
# self.create_bounds(window_height, window_width)
|
||||
# create ship
|
||||
self.finished_idx = None
|
||||
self.init_ships = init_ships
|
||||
self.battery_capacity = None
|
||||
|
|
@ -121,6 +124,7 @@ class SeaEnvEngine(object):
|
|||
self.fields = np.zeros(
|
||||
shape=(self.window_width//field_size[0], self.window_height//field_size[1]))
|
||||
|
||||
# create obstacles
|
||||
self.obstacles = []
|
||||
self.obstacles_w_h = []
|
||||
for obstacle_key in obstacles.keys():
|
||||
|
|
@ -128,6 +132,7 @@ class SeaEnvEngine(object):
|
|||
cur_obstacle = self.create_rectangle_obstacle(x, y, width, height)
|
||||
self.obstacles.append(cur_obstacle)
|
||||
self.obstacles_w_h.append((width, height))
|
||||
# label the position of obstacles as -1
|
||||
for i in range(x//self.field_size[0], (x+width)//self.field_size[0]):
|
||||
for j in range(y//self.field_size[1], (y+height)//self.field_size[1]):
|
||||
self.fields[i, self.fields.shape[1]-j-1] = -1
|
||||
|
|
@ -195,6 +200,7 @@ class SeaEnvEngine(object):
|
|||
for s in static:
|
||||
s.friction = 1.
|
||||
s.group = 1
|
||||
# bound is the same as obstacle for collision
|
||||
s.collision_type = COLLISION_OBSTACLE
|
||||
s.color = THECOLORS['blue']
|
||||
self.space.add(*static)
|
||||
|
|
@ -224,8 +230,10 @@ class SeaEnvEngine(object):
|
|||
self._ship_charging_time_left = [0 for _ in range(self.ship_num)]
|
||||
|
||||
def create_rectangle_obstacle(self, x, y, width, height):
|
||||
# points = [(0, 0), (0, height), (width, height), (width, 0)]
|
||||
points = [(-width/2, -height/2), (-width/2, height/2),
|
||||
(width/2, height/2), (width/2, -height/2)]
|
||||
# points = [(-width, -height), (-width, 0), (0, 0), (0, -height)]
|
||||
mass = 9999999999
|
||||
moment = pymunk.moment_for_poly(mass, points, (0, 0))
|
||||
obstacle_body = pymunk.Body(mass=mass, moment=moment)
|
||||
|
|
@ -247,7 +255,7 @@ class SeaEnvEngine(object):
|
|||
return self._ship_batteries[ship_id]
|
||||
|
||||
def frame_step(self, actions: List[int]):
|
||||
"""
|
||||
"""frame update for one step
|
||||
|
||||
Args:
|
||||
action (int): the next direction of the ship
|
||||
|
|
@ -262,11 +270,11 @@ class SeaEnvEngine(object):
|
|||
raise AssertionError("Cannot continue running after crash!")
|
||||
|
||||
for ship_id, action in enumerate(actions):
|
||||
if action == UP:
|
||||
if action == UP: # up
|
||||
self._ship_charging[ship_id] = False
|
||||
self._ship_charging_time_left[ship_id] = 0
|
||||
self.ship_body[ship_id].angle = 1.5*np.pi
|
||||
elif action == DOWN:
|
||||
elif action == DOWN: # down
|
||||
self._ship_charging[ship_id] = False
|
||||
self._ship_charging_time_left[ship_id] = 0
|
||||
self.ship_body[ship_id].angle = 0.5*np.pi
|
||||
|
|
@ -354,6 +362,7 @@ class SeaEnvEngine(object):
|
|||
|
||||
self.ship_body[ship_id].angle = process_angle(
|
||||
self.ship_body[ship_id].angle)
|
||||
# calculate velocity with direction
|
||||
driving_direction = Vec2d(1, 0).rotated(
|
||||
self.ship_body[ship_id].angle)
|
||||
|
||||
|
|
@ -363,7 +372,7 @@ class SeaEnvEngine(object):
|
|||
else:
|
||||
self.ship_body[ship_id].velocity = 0.0 * driving_direction
|
||||
|
||||
# Update the screen and stuff
|
||||
# Update the screen and stuff.
|
||||
if self.draw_screen:
|
||||
# self.screen.fill(THECOLORS["black"])
|
||||
self.screen.blit(self.ss_img, (0, 0))
|
||||
|
|
|
|||
|
|
@ -109,7 +109,13 @@ def make(
|
|||
filling_time: int = 1,
|
||||
cover_ratio: float = 1.0
|
||||
):
|
||||
|
||||
"""
|
||||
if not render:
|
||||
os.environ["SDL_VIDEODRIVER"] = "dummy"
|
||||
else:
|
||||
os.environ["DISPLAY"] = os.popen(
|
||||
'printenv grep DISPLAY').read().strip()
|
||||
"""
|
||||
|
||||
with open(os.path.join('Palette', 'maps', f'{env_config}.yaml'), 'r') as f:
|
||||
config = yaml.safe_load(f)
|
||||
|
|
@ -154,5 +160,5 @@ if __name__ == '__main__':
|
|||
|
||||
if t:
|
||||
break
|
||||
|
||||
# sea_env.reset()
|
||||
print(steps)
|
||||
|
|
|
|||
|
|
@ -1,4 +1,5 @@
|
|||
import numpy as np
|
||||
import random
|
||||
|
||||
from math import acos, asin
|
||||
|
||||
|
|
@ -17,9 +18,12 @@ def process_angle(_angle):
|
|||
|
||||
def asincos(sin_value, cos_value):
|
||||
if sin_value >= 0:
|
||||
# 第一象限和第二象限
|
||||
return acos(cos_value)
|
||||
else:
|
||||
if cos_value >= 0:
|
||||
# 第四象限
|
||||
return asin(sin_value)
|
||||
else:
|
||||
# 第三象限
|
||||
return 2*np.pi - acos(cos_value)
|
||||
|
|
|
|||
|
|
@ -17,6 +17,7 @@ def generate_agent_fields(fields, ship_num, splited_areas):
|
|||
for _ in range(ship_num)], axis=0)
|
||||
for ship_id in range(1, ship_num+1):
|
||||
cur_fields = agents_fields[ship_id-1]
|
||||
# print((splited_areas != ship_id) * (splited_areas != -1))
|
||||
cur_fields[(splited_areas != ship_id) * (splited_areas != -1)] += 1
|
||||
return agents_fields
|
||||
|
||||
|
|
|
|||
|
|
@ -17,6 +17,7 @@ def generate_agent_fields(fields, ship_num, splited_areas):
|
|||
for _ in range(ship_num)], axis=0)
|
||||
for ship_id in range(1, ship_num+1):
|
||||
cur_fields = agents_fields[ship_id-1]
|
||||
# print((splited_areas != ship_id) * (splited_areas != -1))
|
||||
cur_fields[(splited_areas != ship_id) * (splited_areas != -1)] += 1
|
||||
return agents_fields
|
||||
|
||||
|
|
@ -28,6 +29,7 @@ def main(env: SeaEnv, agent: MultiGreedy):
|
|||
while True:
|
||||
steps += 1
|
||||
info['redecide_direction'] = redecide_direction
|
||||
# print(np.sum(info['fields'] == 0))
|
||||
agents_fields = generate_agent_fields(
|
||||
info['fields'], env.ship_num, env.splited_areas)
|
||||
agent_info = deepcopy(info)
|
||||
|
|
|
|||
|
|
@ -17,6 +17,7 @@ def generate_agent_fields(fields, ship_num, splited_areas):
|
|||
for _ in range(ship_num)], axis=0)
|
||||
for ship_id in range(1, ship_num+1):
|
||||
cur_fields = agents_fields[ship_id-1]
|
||||
# print((splited_areas != ship_id) * (splited_areas != -1))
|
||||
cur_fields[(splited_areas != ship_id) * (splited_areas != -1)] += 1
|
||||
return agents_fields
|
||||
|
||||
|
|
|
|||
|
|
@ -18,6 +18,7 @@ def generate_agent_fields(fields, ship_num, splited_areas):
|
|||
for _ in range(ship_num)], axis=0)
|
||||
for ship_id in range(1, ship_num+1):
|
||||
cur_fields = agents_fields[ship_id-1]
|
||||
# print((splited_areas != ship_id) * (splited_areas != -1))
|
||||
cur_fields[(splited_areas != ship_id) * (splited_areas != -1)] += 1
|
||||
return agents_fields
|
||||
|
||||
|
|
|
|||
|
|
@ -25,6 +25,8 @@ def main(env: SeaEnv, agent: Union[Boustrophedon, Spiral], wildfire: WildFire):
|
|||
redecide_direction = True
|
||||
cur_area_terminate = False
|
||||
while True:
|
||||
# for _ in range(9999999):
|
||||
# continue
|
||||
info['redecide_direction'] = redecide_direction
|
||||
modified_fields = deepcopy(info['fields'])
|
||||
modified_fields += ((splited_area != area_id)
|
||||
|
|
|
|||
|
|
@ -7,7 +7,7 @@ env:
|
|||
ship_radius: !!int 5
|
||||
ship_velocity: 200
|
||||
sonar_spread_times: !!int 40
|
||||
obstacles:
|
||||
obstacles: # name: [x of the left bottom, y of the left bottom, width, height]
|
||||
obstacle0: [100, 100, 100, 200]
|
||||
obstacle1: [300, 160, 120, 120]
|
||||
obstacle2: [460, 460, 120, 120]
|
||||
|
|
|
|||
|
|
@ -7,7 +7,7 @@ env:
|
|||
ship_radius: !!int 5
|
||||
ship_velocity: 200
|
||||
sonar_spread_times: !!int 40
|
||||
obstacles:
|
||||
obstacles: # name: [x of the left bottom, y of the left bottom, width, height]
|
||||
obstacle0: [100, 600, 100, 200]
|
||||
obstacle1: [300, 360, 120, 120]
|
||||
obstacle2: [660, 460, 120, 120]
|
||||
|
|
|
|||
|
|
@ -7,7 +7,7 @@ env:
|
|||
ship_radius: !!int 5
|
||||
ship_velocity: 200
|
||||
sonar_spread_times: !!int 40
|
||||
obstacles:
|
||||
obstacles: # name: [x of the left bottom, y of the left bottom, width, height]
|
||||
obstacle0: [100, 600, 100, 200]
|
||||
obstacle1: [300, 260, 120, 320]
|
||||
obstacle2: [660, 460, 120, 120]
|
||||
|
|
|
|||
|
|
@ -7,7 +7,7 @@ env:
|
|||
ship_radius: !!int 1
|
||||
ship_velocity: 40
|
||||
sonar_spread_times: !!int 40
|
||||
obstacles:
|
||||
obstacles: # name: [x of the left bottom, y of the left bottom, width, height]
|
||||
obstacle0: [40, 440, 340, 220]
|
||||
obstacle1: [100, 160, 300, 180]
|
||||
obstacle2: [300, 40, 100, 60]
|
||||
|
|
|
|||
|
|
@ -7,7 +7,7 @@ env:
|
|||
ship_radius: !!int 5
|
||||
ship_velocity: 200
|
||||
sonar_spread_times: !!int 40
|
||||
obstacles:
|
||||
obstacles: # name: [x of the left bottom, y of the left bottom, width, height]
|
||||
obstacle0: [40, 440, 340, 220]
|
||||
obstacle1: [100, 160, 300, 180]
|
||||
obstacle2: [300, 40, 100, 60]
|
||||
|
|
|
|||
|
|
@ -7,7 +7,7 @@ env:
|
|||
ship_radius: !!int 1
|
||||
ship_velocity: 40
|
||||
sonar_spread_times: !!int 40
|
||||
obstacles:
|
||||
obstacles: # name: [x of the left bottom, y of the left bottom, width, height]
|
||||
obstacle0: [40, 440, 340, 220]
|
||||
obstacle1: [100, 160, 300, 180]
|
||||
obstacle2: [300, 40, 100, 60]
|
||||
|
|
|
|||
|
|
@ -7,7 +7,7 @@ env:
|
|||
ship_radius: !!int 5
|
||||
ship_velocity: 200
|
||||
sonar_spread_times: !!int 40
|
||||
obstacles:
|
||||
obstacles: # name: [x of the left bottom, y of the left bottom, width, height]
|
||||
obstacle0: [40, 440, 340, 220]
|
||||
obstacle1: [100, 160, 300, 180]
|
||||
obstacle2: [300, 40, 100, 60]
|
||||
|
|
|
|||
|
|
@ -3,11 +3,16 @@ env:
|
|||
window_width: !!int 1000
|
||||
window_height: !!int 1000
|
||||
field_size: [20, 20]
|
||||
|
||||
#start_position:
|
||||
# ship0: [10, 10]
|
||||
# ship1: [990, 990]
|
||||
#start_r:
|
||||
# ship0: !!float 0.0 # pi
|
||||
# ship1: !!float 1.0 # pi
|
||||
ship_radius: !!int 5
|
||||
ship_velocity: 200
|
||||
sonar_spread_times: !!int 40
|
||||
obstacles:
|
||||
obstacles: # name: [x of the left bottom, y of the left bottom, width, height]
|
||||
obstacle0: [100, 100, 100, 200]
|
||||
obstacle1: [300, 160, 120, 120]
|
||||
obstacle2: [460, 460, 120, 120]
|
||||
|
|
|
|||
129
README.md
|
|
@ -4,16 +4,16 @@ SeAI Palette集智调色板是面向集群网络的多节点智能协同路径
|
|||
|
||||
集智调色板软件设计了参数输入模块、算法运行模块及信息输出模块,在不同节点数量要求的前提下划分区域方向,按区域进行算法的运行。并可以综合考虑固定节点、覆盖率、电池容量等条件下,给出运行步数、重复步数和重复率等等性能指标。
|
||||
|
||||
软件界面简单,易学易用,包含参数的输入选择,程序的运行,算法结果的展示等,源代码公开,算法可修改。
|
||||
软件界面简单,易学已用,包含参数的输入选择,程序的运行,算法结果的展示等,源代码公开,算法可修改。
|
||||
|
||||
开发人员:王凯、于化鹏、李晶、王兆琦、李慧涛、赵志允、张乐飞、陈光
|
||||
开发人员:H.P. Yu、K. Wang、J. Li、H.T. Li、Z.Q. Wang、Z.Y. Zhao、L.F. Zhang、G. Chen
|
||||
|
||||
## 1. 开发环境配置
|
||||
运行以下命令:
|
||||
```bash
|
||||
conda env create -f create_env.yaml
|
||||
```
|
||||
该命令会根据create_env.yaml配置文件创建一个名为`Palette`的conda虚拟环境,继续输入`conda activate Palette`即可激活该虚拟环境。
|
||||
该命令会创建一个名为`Palette`的conda虚拟环境,用`conda activate Palette`即可激活该虚拟环境。
|
||||
|
||||
|
||||
## 2. 软件运行
|
||||
|
|
@ -21,8 +21,125 @@ conda env create -f create_env.yaml
|
|||
```python
|
||||
python main_tt.py
|
||||
```
|
||||
## 3. 一些说明
|
||||
1. 关于程序输出的说明
|
||||
## 3. 问题定义和仿真设计
|
||||
1)环境设计
|
||||
|
||||
环境依赖方面,仿真平台主要基于Python平台实现。具体地,物理仿真引擎使用的是Pymunk,并将物理仿真结果Pygame渲染成可视化结果。此外,在数值计算方面主要使用了Numpy工具包。
|
||||
|
||||
为保证实验结果综合客观,仿真平台包含了三张虚构的海图。
|
||||
|
||||
2)方案设计
|
||||
|
||||
主要考虑了三种方案:
|
||||
|
||||
单AUV全覆盖路径规划,即只规划单个AUV的全覆盖路径;
|
||||
|
||||
多AUV全覆盖路径规划,即需要同时规划多个AUV相互配合情况下的全覆盖路径;
|
||||
|
||||
需要充电的单/多AUV路径规划,即在上面两种方案的基础上,额外考虑AUV的充电的需要,AUV可根据能量情况自行前往充电桩进行充电,降低人工打捞充电带来的巨大运维成本。
|
||||
|
||||
针对以上三种方案,分别设计了仿真实验测试在不同目标覆盖率下,AUV使用不同算法巡航海域所需的总时间以及重复航行区域的大小。
|
||||
|
||||
## 4. 使用算法
|
||||
|
||||
* 栅格法
|
||||
* 牛耕法
|
||||
* 内螺旋法
|
||||
* 贪心法
|
||||
|
||||
## 5. 软硬件运行平台
|
||||
|
||||
(1)配置要求
|
||||
|
||||
<table>
|
||||
<tr>
|
||||
<th>组件</th>
|
||||
<th>配置</th>
|
||||
<th>备注</th>
|
||||
</tr>
|
||||
<tr>
|
||||
<td>系统 </td>
|
||||
<td>Windows 10 家庭中文版 20H2 64位</td>
|
||||
<td>扩展支持Linux和Mac系统</td>
|
||||
</tr>
|
||||
<tr>
|
||||
<td>处理器</td>
|
||||
<td>处理器类型:
|
||||
酷睿i3兼容处理器或速度更快的处理器
|
||||
处理器速度:
|
||||
最低:1.0GHz
|
||||
建议:2.0GHz或更快
|
||||
</td>
|
||||
<td>不支持ARM、IA64等芯片处理器</td>
|
||||
</tr>
|
||||
<tr>
|
||||
<td>内存</td>
|
||||
<td>RAM 16.0 GB (15.7 GB 可用)</td>
|
||||
<td></td>
|
||||
</tr>
|
||||
<tr>
|
||||
<td>显卡</td>
|
||||
<td>最小:核心显卡
|
||||
推荐:GTX1060或同类型显卡
|
||||
</td>
|
||||
<td></td>
|
||||
</tr>
|
||||
<tr>
|
||||
<td>硬盘</td>
|
||||
<td>500G</td>
|
||||
<td></td>
|
||||
</tr>
|
||||
<td>显示器</td>
|
||||
<td>3840×2160像素,高分屏</td>
|
||||
<td></td>
|
||||
</tr>
|
||||
<tr>
|
||||
</tr>
|
||||
<td>软件</td>
|
||||
<td>Anaconda3 2020及以上</td>
|
||||
<td>Python3.7及以上,需手动安装包</td>
|
||||
</tr>
|
||||
</table>
|
||||
|
||||
(2)手动部署搭建及运行
|
||||
推荐的安装步骤如下:
|
||||
安装Anaconda3-2020.02-Windows-x86_64或以上版本;
|
||||
手动安装pygame、pymunk、pyyaml、numpy、easydict和pyqt,安装方式推荐参考如下:
|
||||
```
|
||||
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple pygame==2.0.1
|
||||
```
|
||||
将软件模块文件夹拷贝到电脑中(以D盘为例,路径为D:\island-multi_ships)
|
||||
|
||||
## 6. 模块详细设计
|
||||
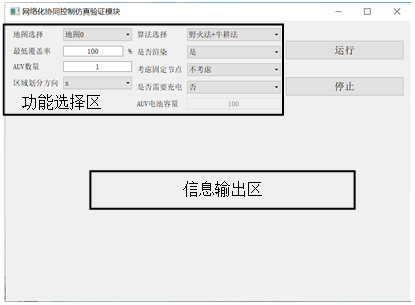
(1)界面设计
|
||||
界面总体设计如下:
|
||||
|
||||
|
||||
|
||||
为了操作简便,主界面只分为功能选择区和信息输出区以及“运行”、“停止”按钮。功能选择区涵盖“地图选择”、“最低覆盖率”、“AUV数量”、“区域划分方向”、“算法选择”、“是否渲染”、“考虑固定节点”、“是否需要充电”和与之相关联的“AUV电池容量”。
|
||||
信息输出区主要包含当前运行的相关信息,包括状态标志、运行完成标志、步数、重复步数、重复率等。
|
||||
|
||||
(2)地图0演示
|
||||
采用“牛耕法”,最低覆盖率100%,AUV数量为1,运行结果如下,步数2373,重复步数60,重复率2.40%。
|
||||
|
||||

|
||||
|
||||
当“是否渲染”选择“否”时,物理引擎图形不展示,程序后台静默运行后自动输出相关状态及结果信息。
|
||||
|
||||

|
||||
|
||||
|
||||
当AUV数量为3时,使用的步数大大减少,仅需要706步,重复步数为38,重复率1.52%。
|
||||

|
||||

|
||||
|
||||
算法选择“贪心法”,使用的步数705,重复步数33,重复率1.32%,和“牛耕法”相同。
|
||||
|
||||
当考虑充电时,设置电池容量为100,使用的步数964,重复步数709,重复率28.36%。
|
||||
|
||||
## 7. 其他说明
|
||||
|
||||
* 程序输出的说明
|
||||
|
||||
程序运行结束后会在命令行输出类似于下面的结果:
|
||||
```
|
||||
|
|
@ -34,7 +151,7 @@ python main_tt.py
|
|||
```
|
||||
分别为使用的步数,重复的步数和重复率。
|
||||
|
||||
2. 关于渲染结果的说明
|
||||
* 关于渲染结果的说明
|
||||
|
||||
渲染中不同移动节点负责的区域用不同颜色标记,每个区域颜色越深表示该区域被重复走的次数越多。
|
||||
|
||||
|
|
|
|||
|
|
@ -3,6 +3,7 @@ from MainWindow_map import Ui_MainWindow
|
|||
from PyQt5 import QtWidgets, QtCore, QtSql, QtGui
|
||||
from PyQt5.QtWidgets import *
|
||||
from PyQt5.QtCore import *
|
||||
from PyQt5.QtGui import QPixmap
|
||||
|
||||
import threading, time, subprocess
|
||||
|
||||
|
|
@ -121,5 +122,6 @@ class mywindow(QtWidgets.QMainWindow, Ui_MainWindow):
|
|||
if __name__ == '__main__':
|
||||
app = QApplication(sys.argv)
|
||||
window = mywindow()
|
||||
# window.showMaximized()
|
||||
window.show()
|
||||
sys.exit(app.exec_())
|
||||
|
|
|
|||
{kind=link}
|
After Width: | Height: | Size: 28 KiB |
{kind=link}
|
After Width: | Height: | Size: 17 KiB |
{kind=link}
|
After Width: | Height: | Size: 1.5 MiB |
{kind=link}
|
After Width: | Height: | Size: 13 KiB |
{kind=link}
|
After Width: | Height: | Size: 74 KiB |
{kind=link}
|
After Width: | Height: | Size: 16 KiB |
{kind=link}
|
After Width: | Height: | Size: 13 KiB |
{kind=link}
|
After Width: | Height: | Size: 14 KiB |
{kind=link}
|
After Width: | Height: | Size: 74 KiB |