Compare commits
2 Commits
master
...
change.mai
| Author | SHA1 | Date |
|---|---|---|
|
|
a72ea1c58b | |
|
|
035ce41d9e |
|
|
@ -0,0 +1,3 @@
|
|||
# Default ignored files
|
||||
/shelf/
|
||||
/workspace.xml
|
||||
|
|
@ -0,0 +1,12 @@
|
|||
<?xml version="1.0" encoding="UTF-8"?>
|
||||
<module type="PYTHON_MODULE" version="4">
|
||||
<component name="NewModuleRootManager">
|
||||
<content url="file://$MODULE_DIR$" />
|
||||
<orderEntry type="inheritedJdk" />
|
||||
<orderEntry type="sourceFolder" forTests="false" />
|
||||
</component>
|
||||
<component name="PyDocumentationSettings">
|
||||
<option name="format" value="PLAIN" />
|
||||
<option name="myDocStringFormat" value="Plain" />
|
||||
</component>
|
||||
</module>
|
||||
|
|
@ -0,0 +1,13 @@
|
|||
<component name="InspectionProjectProfileManager">
|
||||
<profile version="1.0">
|
||||
<option name="myName" value="Project Default" />
|
||||
<inspection_tool class="PyUnresolvedReferencesInspection" enabled="true" level="WARNING" enabled_by_default="true">
|
||||
<option name="ignoredIdentifiers">
|
||||
<list>
|
||||
<option value="runtest.ImageEditorPage" />
|
||||
<option value="ImageEditorPage" />
|
||||
</list>
|
||||
</option>
|
||||
</inspection_tool>
|
||||
</profile>
|
||||
</component>
|
||||
|
|
@ -0,0 +1,6 @@
|
|||
<component name="InspectionProjectProfileManager">
|
||||
<settings>
|
||||
<option name="USE_PROJECT_PROFILE" value="false" />
|
||||
<version value="1.0" />
|
||||
</settings>
|
||||
</component>
|
||||
|
|
@ -0,0 +1,4 @@
|
|||
<?xml version="1.0" encoding="UTF-8"?>
|
||||
<project version="4">
|
||||
<component name="ProjectRootManager" version="2" project-jdk-name="Python 3.7 (Palette)" project-jdk-type="Python SDK" />
|
||||
</project>
|
||||
|
|
@ -0,0 +1,8 @@
|
|||
<?xml version="1.0" encoding="UTF-8"?>
|
||||
<project version="4">
|
||||
<component name="ProjectModuleManager">
|
||||
<modules>
|
||||
<module fileurl="file://$PROJECT_DIR$/.idea/SeAIPalette.iml" filepath="$PROJECT_DIR$/.idea/SeAIPalette.iml" />
|
||||
</modules>
|
||||
</component>
|
||||
</project>
|
||||
|
|
@ -0,0 +1,6 @@
|
|||
<?xml version="1.0" encoding="UTF-8"?>
|
||||
<project version="4">
|
||||
<component name="VcsDirectoryMappings">
|
||||
<mapping directory="$PROJECT_DIR$" vcs="Git" />
|
||||
</component>
|
||||
</project>
|
||||
|
|
@ -17,7 +17,6 @@ def generate_agent_fields(fields, ship_num, splited_areas):
|
|||
for _ in range(ship_num)], axis=0)
|
||||
for ship_id in range(1, ship_num+1):
|
||||
cur_fields = agents_fields[ship_id-1]
|
||||
# print((splited_areas != ship_id) * (splited_areas != -1))
|
||||
cur_fields[(splited_areas != ship_id) * (splited_areas != -1)] += 1
|
||||
return agents_fields
|
||||
|
||||
|
|
|
|||
122
README.md
|
|
@ -21,125 +21,9 @@ conda env create -f create_env.yaml
|
|||
```python
|
||||
python main_tt.py
|
||||
```
|
||||
## 3. 问题定义和仿真设计
|
||||
1)环境设计
|
||||
|
||||
环境依赖方面,仿真平台主要基于Python平台实现。具体地,物理仿真引擎使用的是Pymunk,并将物理仿真结果Pygame渲染成可视化结果。此外,在数值计算方面主要使用了Numpy工具包。
|
||||
|
||||
为保证实验结果综合客观,仿真平台包含了三张虚构的海图。
|
||||
|
||||
2)方案设计
|
||||
|
||||
主要考虑了三种方案:
|
||||
|
||||
单AUV全覆盖路径规划,即只规划单个AUV的全覆盖路径;
|
||||
|
||||
多AUV全覆盖路径规划,即需要同时规划多个AUV相互配合情况下的全覆盖路径;
|
||||
|
||||
需要充电的单/多AUV路径规划,即在上面两种方案的基础上,额外考虑AUV的充电的需要,AUV可根据能量情况自行前往充电桩进行充电,降低人工打捞充电带来的巨大运维成本。
|
||||
|
||||
针对以上三种方案,分别设计了仿真实验测试在不同目标覆盖率下,AUV使用不同算法巡航海域所需的总时间以及重复航行区域的大小。
|
||||
|
||||
## 4. 使用算法
|
||||
|
||||
* 栅格法
|
||||
* 牛耕法
|
||||
* 内螺旋法
|
||||
* 贪心法
|
||||
|
||||
## 5. 软硬件运行平台
|
||||
|
||||
(1)配置要求
|
||||
|
||||
<table>
|
||||
<tr>
|
||||
<th>组件</th>
|
||||
<th>配置</th>
|
||||
<th>备注</th>
|
||||
</tr>
|
||||
<tr>
|
||||
<td>系统 </td>
|
||||
<td>Windows 10 家庭中文版 20H2 64位</td>
|
||||
<td>扩展支持Linux和Mac系统</td>
|
||||
</tr>
|
||||
<tr>
|
||||
<td>处理器</td>
|
||||
<td>处理器类型:
|
||||
酷睿i3兼容处理器或速度更快的处理器
|
||||
处理器速度:
|
||||
最低:1.0GHz
|
||||
建议:2.0GHz或更快
|
||||
</td>
|
||||
<td>不支持ARM、IA64等芯片处理器</td>
|
||||
</tr>
|
||||
<tr>
|
||||
<td>内存</td>
|
||||
<td>RAM 16.0 GB (15.7 GB 可用)</td>
|
||||
<td></td>
|
||||
</tr>
|
||||
<tr>
|
||||
<td>显卡</td>
|
||||
<td>最小:核心显卡
|
||||
推荐:GTX1060或同类型显卡
|
||||
</td>
|
||||
<td></td>
|
||||
</tr>
|
||||
<tr>
|
||||
<td>硬盘</td>
|
||||
<td>500G</td>
|
||||
<td></td>
|
||||
</tr>
|
||||
<td>显示器</td>
|
||||
<td>3840×2160像素,高分屏</td>
|
||||
<td></td>
|
||||
</tr>
|
||||
<tr>
|
||||
</tr>
|
||||
<td>软件</td>
|
||||
<td>Anaconda3 2020及以上</td>
|
||||
<td>Python3.7及以上,需手动安装包</td>
|
||||
</tr>
|
||||
</table>
|
||||
|
||||
(2)手动部署搭建及运行
|
||||
推荐的安装步骤如下:
|
||||
安装Anaconda3-2020.02-Windows-x86_64或以上版本;
|
||||
手动安装pygame、pymunk、pyyaml、numpy、easydict和pyqt,安装方式推荐参考如下:
|
||||
```
|
||||
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple pygame==2.0.1
|
||||
```
|
||||
将软件模块文件夹拷贝到电脑中(以D盘为例,路径为D:\island-multi_ships)
|
||||
|
||||
## 6. 模块详细设计
|
||||
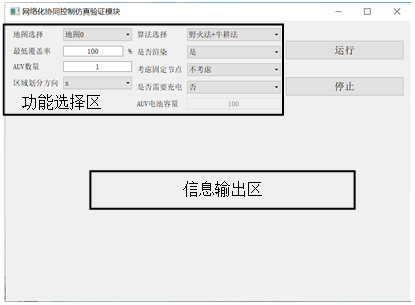
(1)界面设计
|
||||
界面总体设计如下:
|
||||
|
||||
|
||||
|
||||
为了操作简便,主界面只分为功能选择区和信息输出区以及“运行”、“停止”按钮。功能选择区涵盖“地图选择”、“最低覆盖率”、“AUV数量”、“区域划分方向”、“算法选择”、“是否渲染”、“考虑固定节点”、“是否需要充电”和与之相关联的“AUV电池容量”。
|
||||
信息输出区主要包含当前运行的相关信息,包括状态标志、运行完成标志、步数、重复步数、重复率等。
|
||||
|
||||
(2)地图0演示
|
||||
采用“牛耕法”,最低覆盖率100%,AUV数量为1,运行结果如下,步数2373,重复步数60,重复率2.40%。
|
||||
|
||||

|
||||
|
||||
当“是否渲染”选择“否”时,物理引擎图形不展示,程序后台静默运行后自动输出相关状态及结果信息。
|
||||
|
||||

|
||||
|
||||
|
||||
当AUV数量为3时,使用的步数大大减少,仅需要706步,重复步数为38,重复率1.52%。
|
||||

|
||||

|
||||
|
||||
算法选择“贪心法”,使用的步数705,重复步数33,重复率1.32%,和“牛耕法”相同。
|
||||
|
||||
当考虑充电时,设置电池容量为100,使用的步数964,重复步数709,重复率28.36%。
|
||||
|
||||
## 7. 其他说明
|
||||
|
||||
* 程序输出的说明
|
||||
## 3. 一些说明
|
||||
1. 程序输出的说明
|
||||
|
||||
程序运行结束后会在命令行输出类似于下面的结果:
|
||||
```
|
||||
|
|
@ -151,7 +35,7 @@ pip install -i https://pypi.tuna.tsinghua.edu.cn/simple pygame==2.0.1
|
|||
```
|
||||
分别为使用的步数,重复的步数和重复率。
|
||||
|
||||
* 关于渲染结果的说明
|
||||
2. 关于渲染结果的说明
|
||||
|
||||
渲染中不同移动节点负责的区域用不同颜色标记,每个区域颜色越深表示该区域被重复走的次数越多。
|
||||
|
||||
|
|
|
|||
|
|
@ -3,7 +3,6 @@ from MainWindow_map import Ui_MainWindow
|
|||
from PyQt5 import QtWidgets, QtCore, QtSql, QtGui
|
||||
from PyQt5.QtWidgets import *
|
||||
from PyQt5.QtCore import *
|
||||
from PyQt5.QtGui import QPixmap
|
||||
|
||||
import threading, time, subprocess
|
||||
|
||||
|
|
|
|||
BIN
pic2/3.png
{kind=link}
|
Before Width: | Height: | Size: 28 KiB |
BIN
pic2/4.jpg
{kind=link}
|
Before Width: | Height: | Size: 17 KiB |
BIN
pic2/40.png
{kind=link}
|
Before Width: | Height: | Size: 1.5 MiB |
BIN
pic2/5.jpg
{kind=link}
|
Before Width: | Height: | Size: 13 KiB |
BIN
pic2/6.png
{kind=link}
|
Before Width: | Height: | Size: 74 KiB |
BIN
pic2/7.jpg
{kind=link}
|
Before Width: | Height: | Size: 16 KiB |
BIN
pic2/8.jpg
{kind=link}
|
Before Width: | Height: | Size: 13 KiB |
BIN
pic2/9.jpg
{kind=link}
|
Before Width: | Height: | Size: 14 KiB |
BIN
pic2/9.png
{kind=link}
|
Before Width: | Height: | Size: 74 KiB |