diff --git a/.flake8 b/.flake8
new file mode 100644
index 0000000..0739a98
--- /dev/null
+++ b/.flake8
@@ -0,0 +1,2 @@
+[flake8]
+ignore = E203, W503, E501, E231, F401, F403
diff --git a/.gitignore b/.gitignore
new file mode 100644
index 0000000..cdb6802
--- /dev/null
+++ b/.gitignore
@@ -0,0 +1,129 @@
+# Byte-compiled / optimized / DLL files
+__pycache__/
+*.py[cod]
+*$py.class
+
+# C extensions
+*.so
+
+# Distribution / packaging
+.Python
+build/
+develop-eggs/
+dist/
+downloads/
+eggs/
+.eggs/
+lib/
+lib64/
+parts/
+sdist/
+var/
+wheels/
+*.egg-info/
+.installed.cfg
+*.egg
+MANIFEST
+
+# PyInstaller
+# Usually these files are written by a python script from a template
+# before PyInstaller builds the exe, so as to inject date/other infos into it.
+*.manifest
+*.spec
+
+# Installer logs
+pip-log.txt
+pip-delete-this-directory.txt
+
+# Unit test / coverage reports
+htmlcov/
+.tox/
+.coverage
+.coverage.*
+.cache
+nosetests.xml
+coverage.xml
+*.cover
+.hypothesis/
+.pytest_cache/
+
+# Translations
+*.mo
+*.pot
+
+# Django stuff:
+*.log
+local_settings.py
+db.sqlite3
+
+# Flask stuff:
+instance/
+.webassets-cache
+
+# Scrapy stuff:
+.scrapy
+
+# Sphinx documentation
+docs/_build/
+
+# Dash docset
+docs/dash/
+
+# PyBuilder
+target/
+
+# Jupyter Notebook
+.ipynb_checkpoints
+
+# pyenv
+.python-version
+
+# celery beat schedule file
+celerybeat-schedule
+
+# SageMath parsed files
+*.sage.py
+
+# Environments
+.env
+.venv
+env/
+venv/
+ENV/
+env.bak/
+venv.bak/
+include/
+
+# Spyder project settings
+.spyderproject
+.spyproject
+
+# Rope project settings
+.ropeproject
+
+# mkdocs documentation
+/site
+
+# mypy
+.mypy_cache/
+
+# notebooks
+notebooks/
+
+# PyCharm related
+.idea/
+
+# VSCode
+.vscode/
+/share/
+/etc/
+/bin/
+
+# cache
+*.vtu
+*.csv
+*.npz
+*.ckpt
+events.out*
+*.png
+*.mat
\ No newline at end of file
diff --git a/Dockerfile b/Dockerfile
new file mode 100644
index 0000000..2dd1ff7
--- /dev/null
+++ b/Dockerfile
@@ -0,0 +1,27 @@
+FROM pytorch/pytorch:1.7.0-cuda11.0-cudnn8-devel
+RUN apt-get update && apt-get install -y openssh-server nfs-common && \
+ echo "PermitRootLogin yes" >> /etc/ssh/sshd_config && \
+ (echo '123456'; echo '123456') | passwd root
+
+RUN pip install -i https://pypi.mirrors.ustc.edu.cn/simple/ transforms3d \
+ typing \
+ numpy \
+ keras \
+ h5py \
+ pandas \
+ zipfile36 \
+ scikit-optimize \
+ pytest \
+ sphinx \
+ matplotlib \
+ myst_parser \
+ sphinx_rtd_theme==0.5.2 \
+ tensorboard==2.4.1 \
+ sympy==1.5.1 \
+ pyevtk==1.1.1 \
+ flask==1.1.2 \
+ requests==2.25.0 \
+ networkx==2.5.1
+COPY . /idrlnet/
+RUN cd /idrlnet && pip install -e .
+ENTRYPOINT service ssh start && bash
\ No newline at end of file
diff --git a/LICENSE b/LICENSE
new file mode 100644
index 0000000..cf1fde7
--- /dev/null
+++ b/LICENSE
@@ -0,0 +1,202 @@
+
+ Apache License
+ Version 2.0, January 2004
+ http://www.apache.org/licenses/
+
+ TERMS AND CONDITIONS FOR USE, REPRODUCTION, AND DISTRIBUTION
+
+ 1. Definitions.
+
+ "License" shall mean the terms and conditions for use, reproduction,
+ and distribution as defined by Sections 1 through 9 of this document.
+
+ "Licensor" shall mean the copyright owner or entity authorized by
+ the copyright owner that is granting the License.
+
+ "Legal Entity" shall mean the union of the acting entity and all
+ other entities that control, are controlled by, or are under common
+ control with that entity. For the purposes of this definition,
+ "control" means (i) the power, direct or indirect, to cause the
+ direction or management of such entity, whether by contract or
+ otherwise, or (ii) ownership of fifty percent (50%) or more of the
+ outstanding shares, or (iii) beneficial ownership of such entity.
+
+ "You" (or "Your") shall mean an individual or Legal Entity
+ exercising permissions granted by this License.
+
+ "Source" form shall mean the preferred form for making modifications,
+ including but not limited to software source code, documentation
+ source, and configuration files.
+
+ "Object" form shall mean any form resulting from mechanical
+ transformation or translation of a Source form, including but
+ not limited to compiled object code, generated documentation,
+ and conversions to other media types.
+
+ "Work" shall mean the work of authorship, whether in Source or
+ Object form, made available under the License, as indicated by a
+ copyright notice that is included in or attached to the work
+ (an example is provided in the Appendix below).
+
+ "Derivative Works" shall mean any work, whether in Source or Object
+ form, that is based on (or derived from) the Work and for which the
+ editorial revisions, annotations, elaborations, or other modifications
+ represent, as a whole, an original work of authorship. For the purposes
+ of this License, Derivative Works shall not include works that remain
+ separable from, or merely link (or bind by name) to the interfaces of,
+ the Work and Derivative Works thereof.
+
+ "Contribution" shall mean any work of authorship, including
+ the original version of the Work and any modifications or additions
+ to that Work or Derivative Works thereof, that is intentionally
+ submitted to Licensor for inclusion in the Work by the copyright owner
+ or by an individual or Legal Entity authorized to submit on behalf of
+ the copyright owner. For the purposes of this definition, "submitted"
+ means any form of electronic, verbal, or written communication sent
+ to the Licensor or its representatives, including but not limited to
+ communication on electronic mailing lists, source code control systems,
+ and issue tracking systems that are managed by, or on behalf of, the
+ Licensor for the purpose of discussing and improving the Work, but
+ excluding communication that is conspicuously marked or otherwise
+ designated in writing by the copyright owner as "Not a Contribution."
+
+ "Contributor" shall mean Licensor and any individual or Legal Entity
+ on behalf of whom a Contribution has been received by Licensor and
+ subsequently incorporated within the Work.
+
+ 2. Grant of Copyright License. Subject to the terms and conditions of
+ this License, each Contributor hereby grants to You a perpetual,
+ worldwide, non-exclusive, no-charge, royalty-free, irrevocable
+ copyright license to reproduce, prepare Derivative Works of,
+ publicly display, publicly perform, sublicense, and distribute the
+ Work and such Derivative Works in Source or Object form.
+
+ 3. Grant of Patent License. Subject to the terms and conditions of
+ this License, each Contributor hereby grants to You a perpetual,
+ worldwide, non-exclusive, no-charge, royalty-free, irrevocable
+ (except as stated in this section) patent license to make, have made,
+ use, offer to sell, sell, import, and otherwise transfer the Work,
+ where such license applies only to those patent claims licensable
+ by such Contributor that are necessarily infringed by their
+ Contribution(s) alone or by combination of their Contribution(s)
+ with the Work to which such Contribution(s) was submitted. If You
+ institute patent litigation against any entity (including a
+ cross-claim or counterclaim in a lawsuit) alleging that the Work
+ or a Contribution incorporated within the Work constitutes direct
+ or contributory patent infringement, then any patent licenses
+ granted to You under this License for that Work shall terminate
+ as of the date such litigation is filed.
+
+ 4. Redistribution. You may reproduce and distribute copies of the
+ Work or Derivative Works thereof in any medium, with or without
+ modifications, and in Source or Object form, provided that You
+ meet the following conditions:
+
+ (a) You must give any other recipients of the Work or
+ Derivative Works a copy of this License; and
+
+ (b) You must cause any modified files to carry prominent notices
+ stating that You changed the files; and
+
+ (c) You must retain, in the Source form of any Derivative Works
+ that You distribute, all copyright, patent, trademark, and
+ attribution notices from the Source form of the Work,
+ excluding those notices that do not pertain to any part of
+ the Derivative Works; and
+
+ (d) If the Work includes a "NOTICE" text file as part of its
+ distribution, then any Derivative Works that You distribute must
+ include a readable copy of the attribution notices contained
+ within such NOTICE file, excluding those notices that do not
+ pertain to any part of the Derivative Works, in at least one
+ of the following places: within a NOTICE text file distributed
+ as part of the Derivative Works; within the Source form or
+ documentation, if provided along with the Derivative Works; or,
+ within a display generated by the Derivative Works, if and
+ wherever such third-party notices normally appear. The contents
+ of the NOTICE file are for informational purposes only and
+ do not modify the License. You may add Your own attribution
+ notices within Derivative Works that You distribute, alongside
+ or as an addendum to the NOTICE text from the Work, provided
+ that such additional attribution notices cannot be construed
+ as modifying the License.
+
+ You may add Your own copyright statement to Your modifications and
+ may provide additional or different license terms and conditions
+ for use, reproduction, or distribution of Your modifications, or
+ for any such Derivative Works as a whole, provided Your use,
+ reproduction, and distribution of the Work otherwise complies with
+ the conditions stated in this License.
+
+ 5. Submission of Contributions. Unless You explicitly state otherwise,
+ any Contribution intentionally submitted for inclusion in the Work
+ by You to the Licensor shall be under the terms and conditions of
+ this License, without any additional terms or conditions.
+ Notwithstanding the above, nothing herein shall supersede or modify
+ the terms of any separate license agreement you may have executed
+ with Licensor regarding such Contributions.
+
+ 6. Trademarks. This License does not grant permission to use the trade
+ names, trademarks, service marks, or product names of the Licensor,
+ except as required for reasonable and customary use in describing the
+ origin of the Work and reproducing the content of the NOTICE file.
+
+ 7. Disclaimer of Warranty. Unless required by applicable law or
+ agreed to in writing, Licensor provides the Work (and each
+ Contributor provides its Contributions) on an "AS IS" BASIS,
+ WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or
+ implied, including, without limitation, any warranties or conditions
+ of TITLE, NON-INFRINGEMENT, MERCHANTABILITY, or FITNESS FOR A
+ PARTICULAR PURPOSE. You are solely responsible for determining the
+ appropriateness of using or redistributing the Work and assume any
+ risks associated with Your exercise of permissions under this License.
+
+ 8. Limitation of Liability. In no event and under no legal theory,
+ whether in tort (including negligence), contract, or otherwise,
+ unless required by applicable law (such as deliberate and grossly
+ negligent acts) or agreed to in writing, shall any Contributor be
+ liable to You for damages, including any direct, indirect, special,
+ incidental, or consequential damages of any character arising as a
+ result of this License or out of the use or inability to use the
+ Work (including but not limited to damages for loss of goodwill,
+ work stoppage, computer failure or malfunction, or any and all
+ other commercial damages or losses), even if such Contributor
+ has been advised of the possibility of such damages.
+
+ 9. Accepting Warranty or Additional Liability. While redistributing
+ the Work or Derivative Works thereof, You may choose to offer,
+ and charge a fee for, acceptance of support, warranty, indemnity,
+ or other liability obligations and/or rights consistent with this
+ License. However, in accepting such obligations, You may act only
+ on Your own behalf and on Your sole responsibility, not on behalf
+ of any other Contributor, and only if You agree to indemnify,
+ defend, and hold each Contributor harmless for any liability
+ incurred by, or claims asserted against, such Contributor by reason
+ of your accepting any such warranty or additional liability.
+
+ END OF TERMS AND CONDITIONS
+
+ APPENDIX: How to apply the Apache License to your work.
+
+ To apply the Apache License to your work, attach the following
+ boilerplate notice, with the fields enclosed by brackets "[]"
+ replaced with your own identifying information. (Don't include
+ the brackets!) The text should be enclosed in the appropriate
+ comment syntax for the file format. We also recommend that a
+ file or class name and description of purpose be included on the
+ same "printed page" as the copyright notice for easier
+ identification within third-party archives.
+
+ Copyright 2021 idrl.site
+
+ Licensed under the Apache License, Version 2.0 (the "License");
+ you may not use this file except in compliance with the License.
+ You may obtain a copy of the License at
+
+ http://www.apache.org/licenses/LICENSE-2.0
+
+ Unless required by applicable law or agreed to in writing, software
+ distributed under the License is distributed on an "AS IS" BASIS,
+ WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
+ See the License for the specific language governing permissions and
+ limitations under the License.
diff --git a/MANIFEST.in b/MANIFEST.in
new file mode 100644
index 0000000..fe0e383
--- /dev/null
+++ b/MANIFEST.in
@@ -0,0 +1,4 @@
+include LICENSE
+include README.md
+graft docs
+graft examples
\ No newline at end of file
diff --git a/README.md b/README.md
new file mode 100644
index 0000000..c847a13
--- /dev/null
+++ b/README.md
@@ -0,0 +1,82 @@
+[](https://www.apache.org/licenses/LICENSE-2.0)
+[](https://python.org)
+
+## Installation
+
+### Docker
+
+```bash
+git clone https://git.idrl.site/pengwei/idrlnet_public
+cd idrlnet_public
+docker build . -t idrlnet_dev
+docker run -it -p [EXPOSED_SSH_PORT]:22 -v [CURRENT_WORK_DIR]:/root/pinnnet idrlnet_dev:latest bash
+```
+
+### Anaconda
+
+```bash
+git clone https://git.idrl.site/pengwei/idrlnet_public
+cd idrlnet_public
+conda create -n idrlnet_dev python=3.8 -y
+conda activate idrlnet_dev
+pip install -r requirements.txt
+pip install -e .
+```
+
+# IDRLnet
+
+IDRLnet is a machine learning library on top of [Pytorch](https://www.tensorflow.org/). Use IDRLnet if you need a machine
+learning library that solves both forward and inverse partial differential equations (PDEs) via physics-informed neural
+networks (PINN). IDRLnet is a flexible framework inspired by [Nvidia Simnet](https://developer.nvidia.com/simnet>).
+
+## Features
+
+IDRLnet supports
+
+- complex domain geometries without mesh generation. Provided geometries include interval, triangle, rectangle, polygon,
+ circle, sphere... Other geometries can be constructed using three boolean operations: union, difference, and
+ intersection;
+
+- sampling in the interior of the defined geometry or on the boundary with given conditions.
+
+- enables the user code to be structured. Data sources, operations, constraints are all represented by ``Node``. The graph
+ will be automatically constructed via label symbols of each node. Getting rid of the explicit construction via
+ explicit expressions, users model problems more naturally.
+
+- solving variational minimization problem;
+
+- solving integral differential equation;
+
+- adaptive resampling;
+
+- recover unknown parameters of PDEs from noisy measurement data.
+
+It is also easy to customize IDRLnet to meet new demands.
+
+- Main Dependencies
+
+ - [Matplotlib](https://matplotlib.org/)
+ - [NumPy](http://www.numpy.org/)
+ - [Sympy](https://https://www.sympy.org/)==1.5.1
+ - [pytorch](https://www.tensorflow.org/)>=1.7.0
+
+## Contributing to IDRLnet
+
+First off, thanks for taking the time to contribute!
+
+- **Reporting bugs.** To report a bug, simply open an issue in the GitHub "Issues" section.
+
+- **Suggesting enhancements.** To submit an enhancement suggestion for IDRLnet, including completely new features and
+ minor improvements to existing functionality, let us know by opening an issue.
+
+- **Pull requests.** If you made improvements to IDRLnet, fixed a bug, or had a new example, feel free to send us a
+ pull-request.
+
+- **Asking questions.** To get help on how to use IDRLnet or its functionalities, you can as well open an issue.
+
+- **Answering questions.** If you know the answer to any question in the "Issues", you are welcomed to answer.
+
+## The Team
+
+IDRLnet was originally developed by IDRL lab.
+
diff --git a/docs/Makefile b/docs/Makefile
new file mode 100644
index 0000000..d4bb2cb
--- /dev/null
+++ b/docs/Makefile
@@ -0,0 +1,20 @@
+# Minimal makefile for Sphinx documentation
+#
+
+# You can set these variables from the command line, and also
+# from the environment for the first two.
+SPHINXOPTS ?=
+SPHINXBUILD ?= sphinx-build
+SOURCEDIR = .
+BUILDDIR = _build
+
+# Put it first so that "make" without argument is like "make help".
+help:
+ @$(SPHINXBUILD) -M help "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O)
+
+.PHONY: help Makefile
+
+# Catch-all target: route all unknown targets to Sphinx using the new
+# "make mode" option. $(O) is meant as a shortcut for $(SPHINXOPTS).
+%: Makefile
+ @$(SPHINXBUILD) -M $@ "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O)
diff --git a/docs/conf.py b/docs/conf.py
new file mode 100644
index 0000000..a656b01
--- /dev/null
+++ b/docs/conf.py
@@ -0,0 +1,87 @@
+# Configuration file for the Sphinx documentation builder.
+#
+# This file only contains a selection of the most common options. For a full
+# list see the documentation:
+# https://www.sphinx-doc.org/en/master/usage/configuration.html
+
+# -- Path setup --------------------------------------------------------------
+
+# If extensions (or modules to document with autodoc) are in another directory,
+# add these directories to sys.path here. If the directory is relative to the
+# documentation root, use os.path.abspath to make it absolute, like shown here.
+#
+import os
+import sys
+
+sys.path.insert(0, os.path.abspath('..'))
+
+# -- Project information -----------------------------------------------------
+
+project = 'idrlnet'
+copyright = '2021, IDRL'
+author = 'IDRL'
+
+# The full version, including alpha/beta/rc tags
+release = '1.0.4'
+
+# -- General configuration ---------------------------------------------------
+
+# Add any Sphinx extension module names here, as strings. They can be
+# extensions coming with Sphinx (named 'sphinx.ext.*') or your custom
+# ones.
+extensions = [
+ "sphinx.ext.autodoc",
+ "sphinx.ext.mathjax",
+ "sphinx.ext.napoleon",
+ "sphinx.ext.viewcode",
+ 'myst_parser',
+ 'sphinx.ext.autosectionlabel',
+]
+
+# Add any paths that contain templates here, relative to this directory.
+templates_path = ['_templates']
+
+source_suffix = {
+ '.rst': 'restructuredtext',
+ '.txt': 'markdown',
+ '.md': 'markdown',
+}
+# List of patterns, relative to source directory, that match files and
+# directories to ignore when looking for source files.
+# This pattern also affects html_static_path and html_extra_path.
+exclude_patterns = ['_build', 'Thumbs.db', '.DS_Store']
+
+# -- Options for HTML output -------------------------------------------------
+
+# The theme to use for HTML and HTML Help pages. See the documentation for
+# a list of builtin themes.
+#
+html_theme = 'sphinx_rtd_theme'
+
+# Add any paths that contain custom static files (such as style sheets) here,
+# relative to this directory. They are copied after the builtin static files,
+# so a file named "default.css" will overwrite the builtin "default.css".
+html_static_path = ['_static']
+
+# for MarkdownParser
+from sphinx_markdown_parser.parser import MarkdownParser
+
+
+# def setup(app):
+# # app.add_source_suffix('.md', 'markdown')
+# # app.add_source_parser(MarkdownParser)
+# app.add_config_value('markdown_parser_config', {
+# 'auto_toc_tree_section': 'Content',
+# 'enable_auto_doc_ref': True,
+# 'enable_auto_toc_tree': True,
+# 'enable_eval_rst': True,
+# 'extensions': [
+# 'extra',
+# 'nl2br',
+# 'sane_lists',
+# 'smarty',
+# 'toc',
+# 'wikilinks',
+# 'pymdownx.arithmatex',
+# ],
+# }, True)
diff --git a/docs/index.rst b/docs/index.rst
new file mode 100644
index 0000000..2e820f3
--- /dev/null
+++ b/docs/index.rst
@@ -0,0 +1,48 @@
+Welcome to idrlnet's documentation!
+===================================
+
+.. toctree::
+ :maxdepth: 2
+
+ user/installation
+ user/get_started/tutorial
+ user/cite_idrlnet
+ user/team
+
+Features
+--------
+
+IDRLnet is a machine learning library on top of `Pytorch `_. Use IDRLnet if you need a machine
+learning library that solves both forward and inverse partial differential equations (PDEs) via physics-informed neural
+networks (PINN). IDRLnet is a flexible framework inspired by `Nvidia Simnet `_.
+
+IDRLnet supports
+
+- complex domain geometries without mesh generation. Provided geometries include interval, triangle, rectangle, polygon,
+ circle, sphere... Other geometries can be constructed using three boolean operations: union, difference, and
+ intersection;
+- sampling in the interior of the defined geometry or on the boundary with given conditions.
+- enables the user code to be structured. Data sources, operations, constraints are all represented by ``Node``. The graph
+ will be automatically constructed via label symbols of each node. Getting rid of the explicit construction via
+ explicit expressions, users model problems more naturally.
+- solving variational minimization problem;
+- solving integral differential equation;
+- adaptive resampling;
+- recover unknown parameter of PDEs from noisy measurement data.
+
+API reference
+=============
+If you are looking for usage of a specific function, class or method, please refer to the following part.
+
+.. toctree::
+ :maxdepth: 2
+
+
+ modules/modules
+
+Indices and tables
+==================
+
+* :ref:`genindex`
+* :ref:`modindex`
+* :ref:`search`
diff --git a/docs/make.bat b/docs/make.bat
new file mode 100644
index 0000000..922152e
--- /dev/null
+++ b/docs/make.bat
@@ -0,0 +1,35 @@
+@ECHO OFF
+
+pushd %~dp0
+
+REM Command file for Sphinx documentation
+
+if "%SPHINXBUILD%" == "" (
+ set SPHINXBUILD=sphinx-build
+)
+set SOURCEDIR=.
+set BUILDDIR=_build
+
+if "%1" == "" goto help
+
+%SPHINXBUILD% >NUL 2>NUL
+if errorlevel 9009 (
+ echo.
+ echo.The 'sphinx-build' command was not found. Make sure you have Sphinx
+ echo.installed, then set the SPHINXBUILD environment variable to point
+ echo.to the full path of the 'sphinx-build' executable. Alternatively you
+ echo.may add the Sphinx directory to PATH.
+ echo.
+ echo.If you don't have Sphinx installed, grab it from
+ echo.http://sphinx-doc.org/
+ exit /b 1
+)
+
+%SPHINXBUILD% -M %1 %SOURCEDIR% %BUILDDIR% %SPHINXOPTS% %O%
+goto end
+
+:help
+%SPHINXBUILD% -M help %SOURCEDIR% %BUILDDIR% %SPHINXOPTS% %O%
+
+:end
+popd
diff --git a/docs/modules/idrlnet.architecture.rst b/docs/modules/idrlnet.architecture.rst
new file mode 100644
index 0000000..6a0bef7
--- /dev/null
+++ b/docs/modules/idrlnet.architecture.rst
@@ -0,0 +1,34 @@
+idrlnet.architecture package
+============================
+
+.. automodule:: idrlnet.architecture
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+Submodules
+----------
+
+idrlnet.architecture.grid module
+--------------------------------
+
+.. automodule:: idrlnet.architecture.grid
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.architecture.layer module
+---------------------------------
+
+.. automodule:: idrlnet.architecture.layer
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.architecture.mlp module
+-------------------------------
+
+.. automodule:: idrlnet.architecture.mlp
+ :members:
+ :undoc-members:
+ :show-inheritance:
diff --git a/docs/modules/idrlnet.geo_utils.rst b/docs/modules/idrlnet.geo_utils.rst
new file mode 100644
index 0000000..0dbb317
--- /dev/null
+++ b/docs/modules/idrlnet.geo_utils.rst
@@ -0,0 +1,42 @@
+idrlnet.geo\_utils package
+==========================
+
+.. automodule:: idrlnet.geo_utils
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+Submodules
+----------
+
+idrlnet.geo\_utils.geo module
+-----------------------------
+
+.. automodule:: idrlnet.geo_utils.geo
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.geo\_utils.geo\_builder module
+--------------------------------------
+
+.. automodule:: idrlnet.geo_utils.geo_builder
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.geo\_utils.geo\_obj module
+----------------------------------
+
+.. automodule:: idrlnet.geo_utils.geo_obj
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.geo\_utils.sympy\_np module
+-----------------------------------
+
+.. automodule:: idrlnet.geo_utils.sympy_np
+ :members:
+ :undoc-members:
+ :show-inheritance:
diff --git a/docs/modules/idrlnet.pde_op.rst b/docs/modules/idrlnet.pde_op.rst
new file mode 100644
index 0000000..f742679
--- /dev/null
+++ b/docs/modules/idrlnet.pde_op.rst
@@ -0,0 +1,26 @@
+idrlnet.pde\_op package
+=======================
+
+.. automodule:: idrlnet.pde_op
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+Submodules
+----------
+
+idrlnet.pde\_op.equations module
+--------------------------------
+
+.. automodule:: idrlnet.pde_op.equations
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.pde\_op.operator module
+-------------------------------
+
+.. automodule:: idrlnet.pde_op.operator
+ :members:
+ :undoc-members:
+ :show-inheritance:
diff --git a/docs/modules/idrlnet.rst b/docs/modules/idrlnet.rst
new file mode 100644
index 0000000..a08f87b
--- /dev/null
+++ b/docs/modules/idrlnet.rst
@@ -0,0 +1,124 @@
+idrlnet package
+===============
+
+.. automodule:: idrlnet
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+Subpackages
+-----------
+
+.. toctree::
+ :maxdepth: 4
+
+ idrlnet.architecture
+ idrlnet.geo_utils
+ idrlnet.pde_op
+
+Submodules
+----------
+
+idrlnet.callbacks module
+------------------------
+
+.. automodule:: idrlnet.callbacks
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.data module
+-------------------
+
+.. automodule:: idrlnet.data
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.graph module
+--------------------
+
+.. automodule:: idrlnet.graph
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.header module
+---------------------
+
+.. automodule:: idrlnet.header
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.net module
+------------------
+
+.. automodule:: idrlnet.net
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.node module
+-------------------
+
+.. automodule:: idrlnet.node
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.optim module
+--------------------
+
+.. automodule:: idrlnet.optim
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.pde module
+------------------
+
+.. automodule:: idrlnet.pde
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.receivers module
+------------------------
+
+.. automodule:: idrlnet.receivers
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.shortcut module
+-----------------------
+
+.. automodule:: idrlnet.shortcut
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.solver module
+---------------------
+
+.. automodule:: idrlnet.solver
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.torch\_util module
+--------------------------
+
+.. automodule:: idrlnet.torch_util
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+idrlnet.variable module
+-----------------------
+
+.. automodule:: idrlnet.variable
+ :members:
+ :undoc-members:
+ :show-inheritance:
diff --git a/docs/modules/modules.rst b/docs/modules/modules.rst
new file mode 100644
index 0000000..361be14
--- /dev/null
+++ b/docs/modules/modules.rst
@@ -0,0 +1,7 @@
+idrlnet
+=======
+
+.. toctree::
+ :maxdepth: 4
+
+ idrlnet
diff --git a/docs/user/cite_idrlnet.md b/docs/user/cite_idrlnet.md
new file mode 100644
index 0000000..90f698e
--- /dev/null
+++ b/docs/user/cite_idrlnet.md
@@ -0,0 +1,2 @@
+# Cite IDRLnet
+The paper is to appear on Arxiv.
\ No newline at end of file
diff --git a/docs/user/get_started/1_simple_poisson.md b/docs/user/get_started/1_simple_poisson.md
new file mode 100644
index 0000000..f75f212
--- /dev/null
+++ b/docs/user/get_started/1_simple_poisson.md
@@ -0,0 +1,231 @@
+# Solving Simple Poisson Equation
+
+Inspired by [Nvidia SimNet](https://developer.nvidia.com/simnet),
+IDRLnet employs symbolic links to construct a computational graph automatically.
+In this section, we introduce the primary usage of IDRLnet.
+To solve PINN via IDRLnet, we divide the procedure into several parts:
+
+1. Define symbols and parameters.
+1. Define geometry objects.
+1. Define sampling domains and corresponding constraints.
+1. Define neural networks and PDEs.
+1. Define solver and solve.
+1. Post processing.
+
+We provide the following example to illustrate the primary usages and features of IDRLnet.
+
+Consider the 2d Poisson's equation defined on $\Omega=[-1,1]\times[-1,1]$, which satisfies $-\Delta u=1$, with
+the boundary value conditions:
+
+$$
+\begin{align}
+\frac{\partial u(x, -1)}{\partial n}&=\frac{\partial u(x, 1)}{\partial n}=0 \\
+u(-1,y)&=u(1, y)=0
+\end{align}
+$$
+
+## Define Symbols
+For the 2d problem, we define two coordinate symbols `x` and `y`, which will be used in symbolic expressions in IDRLnet.
+```python
+x, y = sp.symbols('x y')
+```
+Note that variables `x`, `y`, `z`, `t` are reserved inside IDRLnet.
+The four symbols should only represent the 4 primary coordinates.
+
+## Define Geometric Objects
+
+The geometry object is a simple rectangle.
+```python
+rec = sc.Rectangle((-1., -1.), (1., 1.))
+```
+
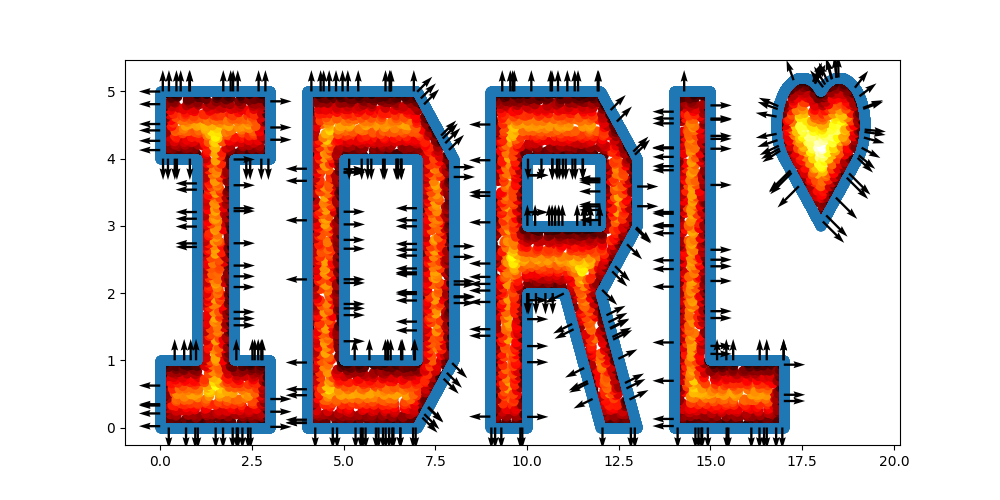
+Users can sample points on these geometry objects. The operators `+`, `-`, `&` are also supported.
+A slightly more complicated example is as follows:
+```python
+import numpy as np
+import idrlnet.shortcut as sc
+
+# Define 4 polygons
+I = sc.Polygon([(0, 0), (3, 0), (3, 1), (2, 1), (2, 4), (3, 4), (3, 5), (0, 5), (0, 4), (1, 4), (1, 1), (0, 1)])
+D = sc.Polygon([(4, 0), (7, 0), (8, 1), (8, 4), (7, 5), (4, 5)]) - sc.Polygon(([5, 1], [7, 1], [7, 4], [5, 4]))
+R = sc.Polygon([(9, 0), (10, 0), (10, 2), (11, 2), (12, 0), (13, 0), (12, 2), (13, 3), (13, 4), (12, 5), (9, 5)]) \
+ - sc.Rectangle(point_1=(10., 3.), point_2=(12, 4))
+L = sc.Polygon([(14, 0), (17, 0), (17, 1), (15, 1), (15, 5), (14, 5)])
+
+# Define a heart shape.
+heart = sc.Heart((18, 4), radius=1)
+
+# Union of the 5 geometry objects
+geo = (I + D + R + L + heart)
+
+# interior samples
+points = geo.sample_interior(density=100, low_discrepancy=True)
+plt.figure(figsize=(10, 5))
+plt.scatter(x=points['x'], y=points['y'], c=points['sdf'], cmap='hot')
+
+# boundary samples
+points = geo.sample_boundary(density=400, low_discrepancy=True)
+plt.scatter(x=points['x'], y=points['y'])
+idx = np.random.choice(points['x'].shape[0], 400, replace=False)
+
+# Show normal directions on boundary
+plt.quiver(points['x'][idx], points['y'][idx], points['normal_x'][idx], points['normal_y'][idx])
+plt.show()
+```
+
+
+## Define Sampling Methods and Constraints
+Take a 1D fitting task as an example.
+The data source generates pairs $(x_i, f_i)$. We train a network $u_\theta(x_i)\approx f_i$.
+Then $f_i$ is the target output of $u_\theta(x_i)$.
+These targets are called constraints in IDRLnet.
+
+For the problem, three constraints are presented.
+
+The constraint
+
+$$
+u(-1,y)=u(1, y)=0
+$$
+is translated into
+```python
+@sc.datanode
+class LeftRight(sc.SampleDomain):
+ # Due to `name` is not specified, LeftRight will be the name of datanode automatically
+ def sampling(self, *args, **kwargs):
+ # sieve define rules to filter points
+ points = rec.sample_boundary(1000, sieve=((y > -1.) & (y < 1.)))
+ constraints = sc.Variables({'T': 0.})
+ return points, constraints
+```
+Then `LeftRight()` is wrapped as an instance of `DataNode`.
+One can store states in these instances.
+Alternatively, if users do not need storing states, the code above is equivalent to
+```python
+@sc.datanode(name='LeftRight')
+def leftright(self, *args, **kwargs):
+ points = rec.sample_boundary(1000, sieve=((y > -1.) & (y < 1.)))
+ constraints = sc.Variables({'T': 0.})
+ return points, constraints
+```
+Then `sampling()` is wrapped as an instance of `DataNode`.
+
+The constraint
+
+$$
+\frac{\partial u(x, -1)}{\partial n}=\frac{\partial u(x, 1)}{\partial n}=0
+$$
+is translated into
+
+```python
+@sc.datanode(name="up_down")
+class UpDownBoundaryDomain(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ points = rec.sample_boundary(1000, sieve=((x > -1.) & (x < 1.)))
+ constraints = sc.Variables({'normal_gradient_T': 0.})
+ return points, constraints
+```
+The constraint `normal_gradient_T` will also be one of the output of computable nodes, including `PdeNode` or `NetNode`.
+
+The last constraint is the PDE itself $-\Delta u=1$:
+
+```python
+@sc.datanode(name="heat_domain")
+class HeatDomain(sc.SampleDomain):
+ def __init__(self):
+ self.points = 1000
+
+ def sampling(self, *args, **kwargs):
+ points = rec.sample_interior(self.points)
+ constraints = sc.Variables({'diffusion_T': 1.})
+ return points, constraints
+```
+`diffusion_T` will also be one of the outputs of computable nodes.
+`self.points` is a stored state and can be varied to control the sampling behaviors.
+
+## Define Neural Networks and PDEs
+As mentioned before, neural networks and PDE expressions are encapsulated as `Node` too.
+The `Node` objects have `inputs`, `derivatives`, `outputs` properties and the `evaluate()` method.
+According to their inputs, derivatives, and outputs, these nodes will be automatically connected as a computational graph.
+A topological sort will be applied to the graph to decide the computation order.
+
+```python
+net = sc.get_net_node(inputs=('x', 'y',), outputs=('T',), name='net1', arch=sc.Arch.mlp)
+```
+This is a simple call to get a neural network with the predefined architecture.
+As an alternative, one can specify the configurations via
+```python
+evaluate = MLP(n_seq=[2, 20, 20, 20, 20, 1)],
+ activation=Activation.swish,
+ initialization=Initializer.kaiming_uniform,
+ weight_norm=True)
+net = NetNode(inputs=('x', 'y',), outputs=('T',), net=evaluate, name='net1', *args, **kwargs)
+```
+which generates a node with
+- `inputs=('x','y')`,
+- `derivatives=tuple()`,
+- `outpus=('T')`
+```python
+pde = sc.DiffusionNode(T='T', D=1., Q=0., dim=2, time=False)
+```
+generates a node with
+- `inputs=tuple()`,
+- `derivatives=('T__x', 'T__y')`,
+- `outputs=('diffusion_T',)`.
+
+```python
+grad = sc.NormalGradient('T', dim=2, time=False)
+```
+generates a node with
+- `inputs=('normal_x', 'normal_y')`,
+- `derivatives=('T__x', 'T__y')`,
+- `outputs=('normal_gradient_T',)`.
+The string `__` is reserved to represent the derivative operator.
+If the required derivatives cannot be directly obtained from outputs of other nodes,
+It will try `autograd` provided by Pytorch with the maximum prefix match from outputs of other nodes.
+
+## Define A Solver
+Initialize a solver to bundle all the components and solve the model.
+```python
+s = sc.Solver(sample_domains=(HeatDomain(), LeftRight(), UpDownBoundaryDomain()),
+ netnodes=[net],
+ pdes=[pde, grad],
+ max_iter=1000)
+s.solve()
+```
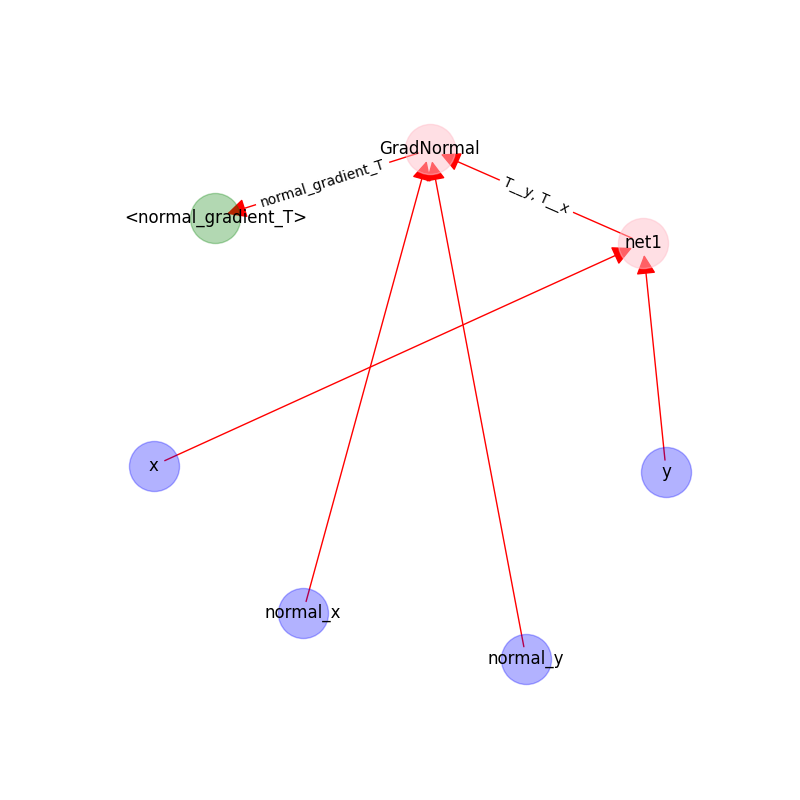
+Before the solver start running, it constructs computational graphs and applies a topological sort to decide the evaluation order.
+Each sample domain has its independent graph.
+The procedures will be executed automatically when the solver detects potential changes in graphs.
+As default, these graphs are also visualized as `png` in the `network` directory named after the corresponding domain.
+
+The following figure shows the graph on `UpDownBoundaryDomain`:
+
+
+- The blue nodes are generated via sampling;
+- the red nodes are computational;
+- the green nodes are constraints(targets).
+
+## Inference
+We use domain `heat_domain` for inference.
+First, we increase the density to 10000 via changing the attributes of the domain.
+Then, `Solver.infer_step()` is called for inference.
+```python
+s.set_domain_parameter('heat_domain', {'points': 10000})
+coord = s.infer_step({'heat_domain': ['x', 'y', 'T']})
+num_x = coord['heat_domain']['x'].cpu().detach().numpy().ravel()
+num_y = coord['heat_domain']['y'].cpu().detach().numpy().ravel()
+num_Tp = coord['heat_domain']['T'].cpu().detach().numpy().ravel()
+```
+
+One may also define a separate domain for inference, which generates `constraints={}`, and thus, no computational graphs will be generated on the domain.
+We will see this later.
+
+## Performance Issues
+1. When a domain is contained by `Solver.sample_domains`, the `sampling()` will be called every iteration.
+ Users should avoid including redundant domains.
+ Future versions will ignore domains with `constraints={}` in training steps.
+2. The current version samples points in memory.
+ When GPU devices are enabled, data exchange between the memory and GPU devices might hinder the performance.
+ In future versions, we will sample points directly in GPU devices if available.
+
+See `examples/simple_poisson`.
\ No newline at end of file
diff --git a/docs/user/get_started/2_euler_beam.md b/docs/user/get_started/2_euler_beam.md
new file mode 100644
index 0000000..f6e4804
--- /dev/null
+++ b/docs/user/get_started/2_euler_beam.md
@@ -0,0 +1,72 @@
+# Euler–Bernoulli beam
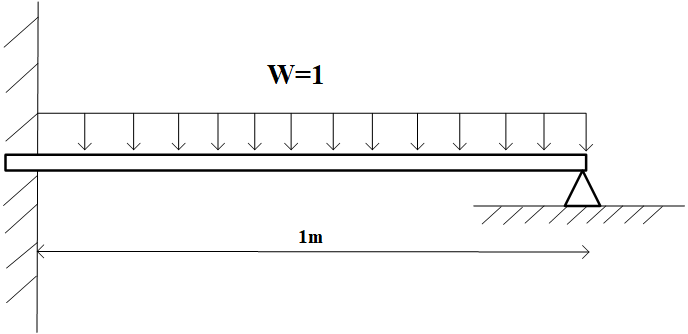
+We consider the Euler–Bernoulli beam equation,
+
+$$
+\begin{align}
+\frac{\partial^{2}}{\partial x^{2}}\left(\frac{\partial^{2} u}{\partial x^{2}}\right)=-1 \\
+u|_{x=0}=0, u^{\prime}|_{x=0}=0, \\
+u^{\prime \prime}|_{x=1}=0, u^{\prime \prime \prime}|_{x=1}=0,
+\end{align}
+$$
+which models the following beam with external forces.
+
+
+
+## Expression Node
+The Euler-Bernoulli beam equation is not implemented inside IDRLnet.
+Users may add the equation to `idrlnet.pde_op.equations`.
+However, one may also define the differential equation via symbol expressions directly.
+
+First, we define a function symbol in the symbol definition part.
+```python
+x = sp.symbols('x')
+y = sp.Function('y')(x)
+```
+In the PDE definition part, we add these PDE nodes:
+
+```python
+pde1 = sc.ExpressionNode(name='dddd_y', expression=y.diff(x).diff(x).diff(x).diff(x) + 1)
+pde2 = sc.ExpressionNode(name='d_y', expression=y.diff(x))
+pde3 = sc.ExpressionNode(name='dd_y', expression=y.diff(x).diff(x))
+pde4 = sc.ExpressionNode(name='ddd_y', expression=y.diff(x).diff(x).diff(x))
+```
+These are instances of `idrl.pde.PdeNode`, which are also computational nodes.
+For example, `pde1` is an instance of `Node` with
+- `inputs=tuple()`;
+- `derivatives=(y__x__x__x__x, )`;
+- `outputs=('dddd_y',)`.
+
+The four PDE nodes match the following operators, respectively:
+- $dy^4/d^4x+1$;
+- $dy/dx$;
+- $dy^2/d^2x$;
+- $dy^3/d^3x$.
+
+## Seperate Inference Domain
+In this example, we define a domain specified for inference.
+```python
+@sc.datanode(name='infer')
+class Infer(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ return {'x': np.linspace(0, 1, 1000).reshape(-1, 1)}, {}
+```
+Its instance is not be passed to the solver initializer,
+which may improve the performance since Infer().sampling
+After the solving procedure ends, we change the `sample_domains` of the solver,
+
+```python
+solver.sample_domains = (Infer(),)
+```
+which triggers the regeneration of the computational graph. Then `solver.infer_step()` is called.
+
+```python
+points = solver.infer_step({'infer': ['x', 'y']})
+xs = points['infer']['x'].detach().cpu().numpy().ravel()
+y_pred = points['infer']['y'].detach().cpu().numpy().ravel()
+```
+
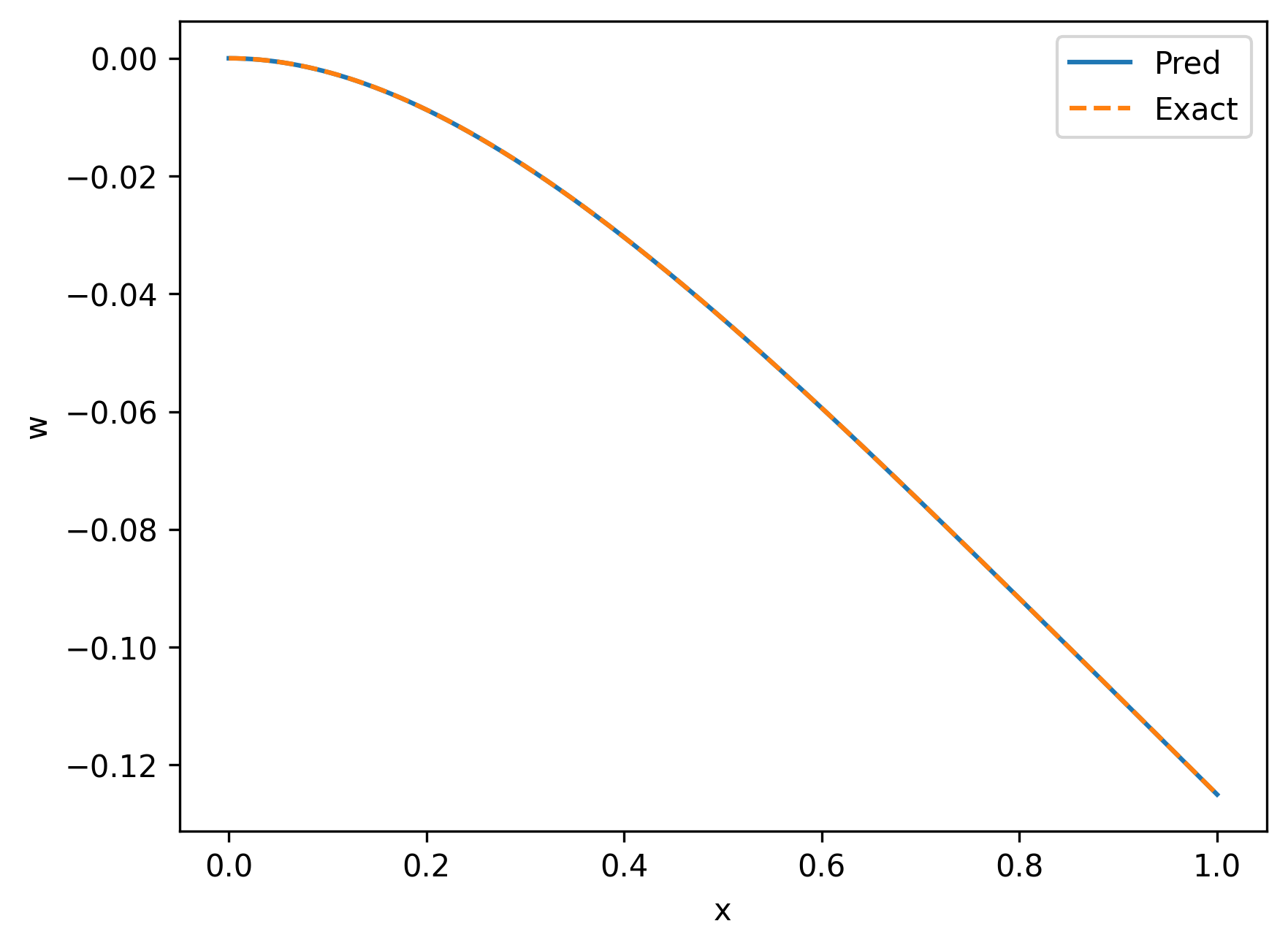
+The result is shown as follows.
+
+
+
+See `examples/euler_beam`.
\ No newline at end of file
diff --git a/docs/user/get_started/3_burgers_equation.md b/docs/user/get_started/3_burgers_equation.md
new file mode 100644
index 0000000..a3d73ef
--- /dev/null
+++ b/docs/user/get_started/3_burgers_equation.md
@@ -0,0 +1,58 @@
+# Burgers' Equation
+Burgers' equation is formulated as following:
+
+$$
+\begin{equation}
+\frac{\partial u}{\partial t}+u \frac{\partial u}{\partial x}=\nu \frac{\partial^{2} u}{\partial x^{2}}
+\end{equation}
+$$
+We have added the template of the equation into `idrlnet.pde_op.equations`.
+In this example, we take $\nu=-0.01/\pi$, and the problem is
+
+$$
+\begin{equation}
+\begin{array}{l}
+u_t+u u_{x}-(0.01 / \pi) u_{x x}=0, \quad x \in[-1,1], \quad t \in[0,1] \\
+u(0, x)=-\sin (\pi x) \\
+u(t,-1)=u(t, 1)=0
+\end{array}
+\end{equation}.
+$$
+
+## Time-dependent Domain
+The equation is time-dependent. In addition, we define a time symbol `t` and its range.
+```python
+t_symbol = Symbol('t')
+time_range = {t_symbol: (0, 1)}
+```
+The parameter range `time_range` will be passed to methods `geo.Geometry.sample_interior()` and `geo.Geometry.sample_boundary()`.
+The sampling methods generate samples containing the additional dims provided in `param_ranges.keys()`.
+```python
+# Interior domain
+points = geo.sample_interior(10000, bounds={x: (-1., 1.)}, param_ranges=time_range)
+
+# Initial value condition
+points = geo.sample_interior(100, param_ranges={t_symbol: 0.0})
+
+# Boundary condition
+points = geo.sample_boundary(100, param_ranges=time_range)
+```
+
+The result is shown as follows:
+
+
+
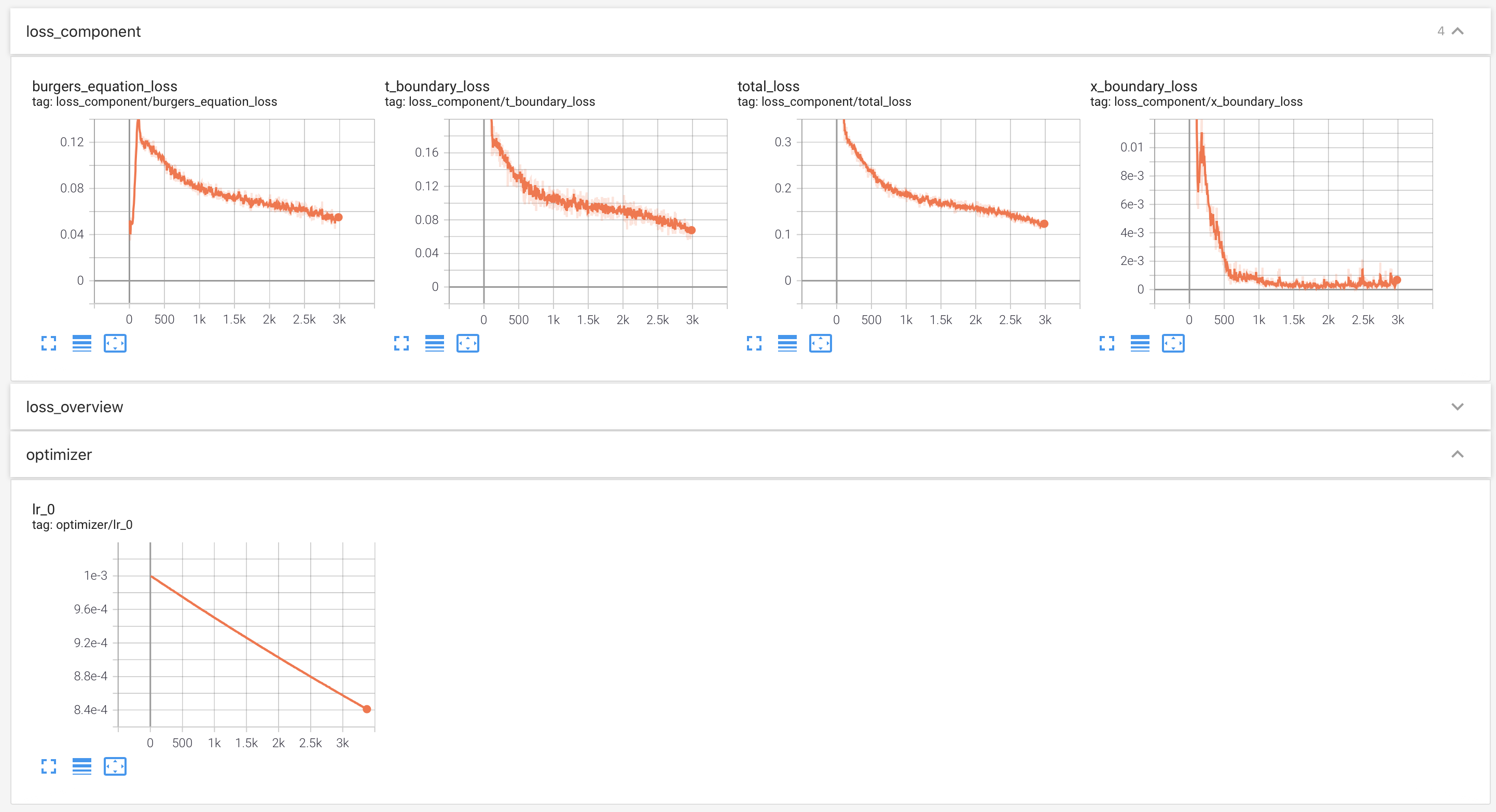
+## Use TensorBoard
+To monitor the training process, we employ [TensorBoard](https://www.tensorflow.org/tensorboard).
+The learning rate, losses on different domains, and the total loss will be recorded automatically.
+Users can call `Solver.summary_receiver()` to get the instance of `SummaryWriter`.
+As default, one starts TensorBoard at `./network_idr`:
+```bash
+tensorboard --logdir ./network_dir
+```
+Users can monitor the status of training:
+
+
+
+
+See `examples/burgers_equation`.
\ No newline at end of file
diff --git a/docs/user/get_started/4_allen_cahn.md b/docs/user/get_started/4_allen_cahn.md
new file mode 100644
index 0000000..6e01273
--- /dev/null
+++ b/docs/user/get_started/4_allen_cahn.md
@@ -0,0 +1,110 @@
+# Allen-Cahn Equation
+
+This section repeats the adaptive PINN method presented by [Wight and Zhao][1].
+
+The Allen-Cahn equation has the following general form:
+
+$$ \partial_{t} u=\gamma_{1} \Delta u+\gamma_{2}\left(u-u^{3}\right). $$
+
+Consider the one-dimensional Allen-Cahn equation with periodic boundary conditions:
+
+$$
+\begin{array}{l}
+u_{t}-0.0001 u_{x x}+5 u^{3}-5 u=0, \quad x \in[-1,1], \quad t \in[0,1], \\
+u(0, x)=x^{2} \cos (\pi x) \\
+u(t,-1)=u(t, 1) \\
+u_{x}(t,-1)=u_{x}(t, 1).
+\end{array}
+$$
+
+## Periodic Boundary Conditions
+
+The periodic boundary conditions are enforced by $u(t, x)=u(t,x+2)$ and $u_x(t, x)=u_x(t,x+2)$ with $x=-1$, which is
+equivalent to
+
+$$
+\begin{array}{l}
+\tilde u(t,x)=u(t,x+2), \quad \forall t\in[0,1],x\in[-1,1], \\
+\tilde u(t,x)=u(t,x),\quad \forall t\in[0,1],x=-1, \\
+\tilde u_x(t,x)=u_x(t,x),\quad \forall t\in[0,1],x=-1.\\
+\end{array}
+$$
+
+The transform above is implemented by
+
+```python
+net_u = sc.MLP([2, 128, 128, 128, 128, 2], activation=sc.Activation.tanh)
+net_u = sc.NetNode(inputs=('x', 't',), outputs=('u',), name='net1', net=net_u)
+xp = sc.ExpressionNode(name='xp', expression=x + 2)
+net_tilde_u = sc.get_shared_net_node(net_u, inputs=('xp', 't',), outputs=('up',), name='net2', arch='mlp')
+```
+
+where `xp` translates $x$ to $x+2$. The node `net_tilde_u` has the same internal parameters as `net_u` while its inputs
+and outputs are translated.
+
+## Receivers acting as Callbacks
+We define a group of `Signal` to trigger receivers.
+They are adequate for customizing various PINN algorithms at the moment.
+
+```python
+class Signal(Enum):
+ REGISTER = 'signal_register'
+ SOLVE_START = 'signal_solve_start'
+ TRAIN_PIPE_START = 'signal_train_pipe_start'
+ AFTER_COMPUTE_LOSS = 'compute_loss'
+ BEFORE_BACKWARD = 'signal_before_backward'
+ TRAIN_PIPE_END = 'signal_train_pipe_end'
+ SOLVE_END = 'signal_solve_end'
+```
+
+We implement the adaptive sampling method as follows.
+```python
+class SpaceAdaptiveReceiver(sc.Receiver):
+ # implement the abstract method in sc.Receiver
+ def receive_notify(self, solver, message):
+ # In each iteration, after the train pipe ends, the receiver will be notified.
+ # Every five 500 iterations, the adaptive sampling will be triggerd.
+ if sc.Signal.TRAIN_PIPE_END in message.keys() and solver.global_step % 1000 == 0:
+ sc.logger.info('space adaptive sampling...')
+ # Do extra sampling and compute the residual
+ results = solver.infer_step({'data_evaluate': ['x', 't', 'sdf', 'AllenCahn_u']})
+ residual_data = results['data_evaluate']['AllenCahn_u'].detach().cpu().numpy().ravel()
+ # Sort the points by residual loss
+ index = np.argsort(-1. * np.abs(residual_data))[:200]
+ _points = {key: values[index].detach().cpu().numpy() for key, values in results['data_evaluate'].items()}
+ _points.pop('AllenCahn_u')
+ _points['area'] = np.zeros_like(_points['sdf']) + (1.0 / 200)
+ # Update the points in the re_samping_domain
+ solver.set_domain_parameter('re_sampling_domain', {'points': _points})
+```
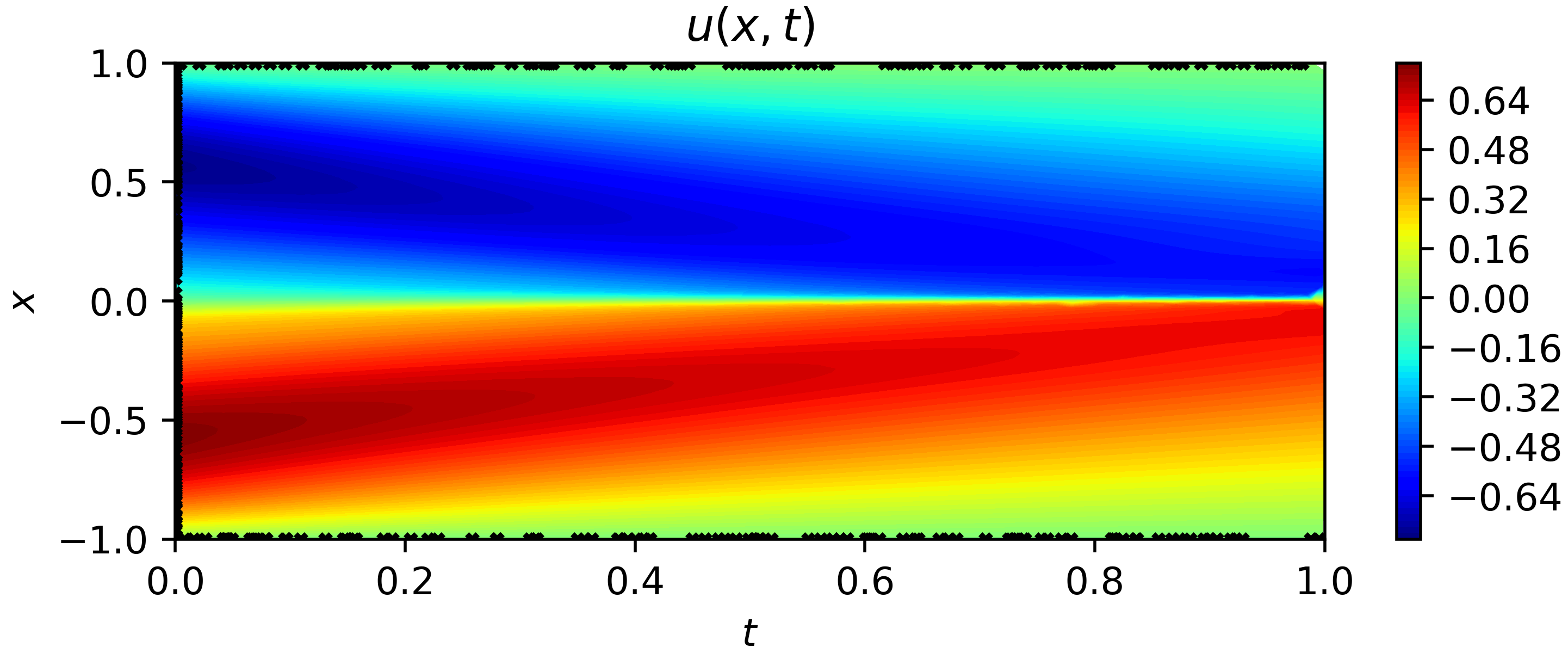
+We also draw the result every $1000$ iterations.
+```python
+class PostProcessReceiver(Receiver):
+ def receive_notify(self, solver, message):
+ if pinnnet.receivers.Signal.TRAIN_PIPE_END in message.keys() and solver.global_step % 1000 == 1:
+ points = s.infer_step({'allen_test': ['x', 't', 'u']})
+ triang_total = tri.Triangulation(points['allen_test']['t'].detach().cpu().numpy().ravel(),
+ points['allen_test']['x'].detach().cpu().numpy().ravel(), )
+ plt.tricontourf(triang_total, points['allen_test']['u'].detach().cpu().numpy().ravel(), 100)
+ tc_bar = plt.colorbar()
+ tc_bar.ax.tick_params(labelsize=12)
+ plt.xlabel('$t$')
+ plt.ylabel('$x$')
+ plt.title('$u(x,t)$')
+ plt.savefig(f'result_{solver.global_step}.png')
+ plt.show()
+```
+Before `Solver.solve()` is called, register the two receivers to the solver:
+
+```python
+s.register_receiver(SpaceAdaptiveReceiver())
+s.register_receiver(PostProcessReceiver())
+```
+
+The training process is shown as follows:
+
+
+
+See `examples/allen_cahn`.
+
+[1]:
\ No newline at end of file
diff --git a/docs/user/get_started/5_inverse_wave_equation.md b/docs/user/get_started/5_inverse_wave_equation.md
new file mode 100644
index 0000000..8f36462
--- /dev/null
+++ b/docs/user/get_started/5_inverse_wave_equation.md
@@ -0,0 +1,94 @@
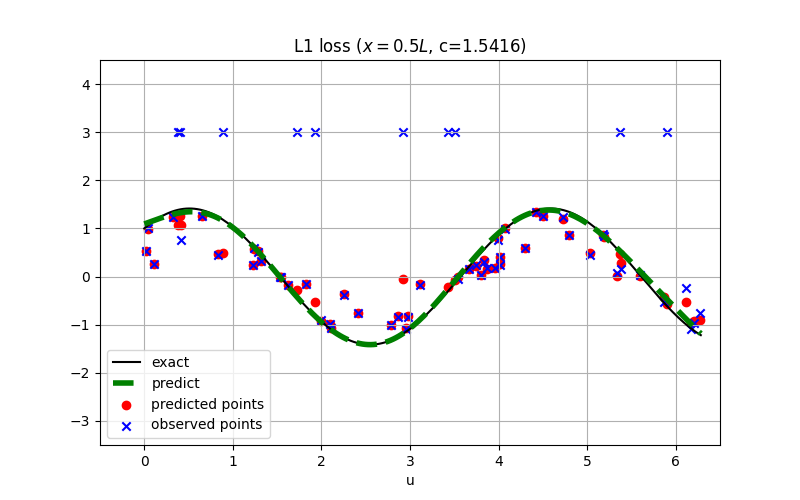
+# Inverse Wave Equation
+Consider the 1d wave equation:
+
+$$
+\begin{equation}
+\frac{\partial^2u}{\partial t^2}=c\frac{\partial^2u}{\partial x^2},
+\end{equation}
+$$
+where $c>0$ is unknown and is to be estimated. A group of data pairs $\{x_i, t_i, u_i\}_{i=1,2,\cdot,N}$ is observed.
+Then the problem is formulated as:
+
+$$
+\min_{u,c} \sum_{i=1,2,\cdots,N} \|u(x_i, t_i)-u_i\|^2\\
+s.t. \frac{\partial^2u}{\partial t^2}=c\frac{\partial^2u}{\partial x^2}
+$$
+
+In the context of PINN, $u$ is parameterized to $u_\theta$.
+The problem above is transformed to the discrete form:
+
+$$
+\min_{\theta,c}
+ w_1\sum_{i=1,2,\cdots,N} \|u_\theta(x_i, t_i)-u_i\|^2
++w_2\sum_{i=1,2,\cdots,M}\left|\frac{\partial^2u_\theta(x_i,t_i)}{\partial t^2}-c\frac{\partial^2u_\theta(x_i,t_i)}{\partial x^2}\right|^2.
+$$
+
+## Importing External Data
+We take the ground truth
+
+$$
+u=\sin x \cdot(\sin 1.54 t + \cos 1.54 t),
+$$
+where $c=1.54$.
+The external data is generated by
+```python
+ points = geo.sample_interior(density=20,
+ bounds={x: (0, L)},
+ param_ranges=time_range,
+ low_discrepancy=True)
+ points['u'] = np.sin(points['x']) * (np.sin(c * points['t']) + np.cos(c * points['t']))
+
+ # Some data points are contaminated.
+ points['u'][np.random.choice(len(points['u']), 10, replace=False)] = 3.
+```
+
+To use the external data as the data source, we define a data node to store the state:
+```python
+@sc.datanode(name='wave_domain', loss_fn='L1')
+class WaveExternal(sc.SampleDomain):
+ def __init__(self):
+ points = pd.read_csv('external_sample.csv')
+ self.points = {col: points[col].to_numpy().reshape(-1, 1) for col in points.columns}
+ self.constraints = {'u': self.points['u']}
+ self.points.pop('u')
+
+ def sampling(self, *args, **kwargs):
+ points = self.points
+ constraints = self.constraints
+ return points, constraints
+
+```
+If large-scale external data are used, users can also implement the `sampling()` method to adapt to external data interfaces.
+
+## Define Unknown Parameters
+
+IDRLnet defines a network node with a single parameter to represent the variable.
+
+```python
+var_c = sc.get_net_node(inputs=('x',), outputs=('c',), arch=sc.Arch.single_var)
+```
+If bounds for variables are available, users can embed the bounds into the definition.
+```python
+var_c = sc.get_net_node(inputs=('x',), outputs=('c',), arch=sc.Arch.bounded_single_var, lower_bound=1., upper_bound=3.0)
+```
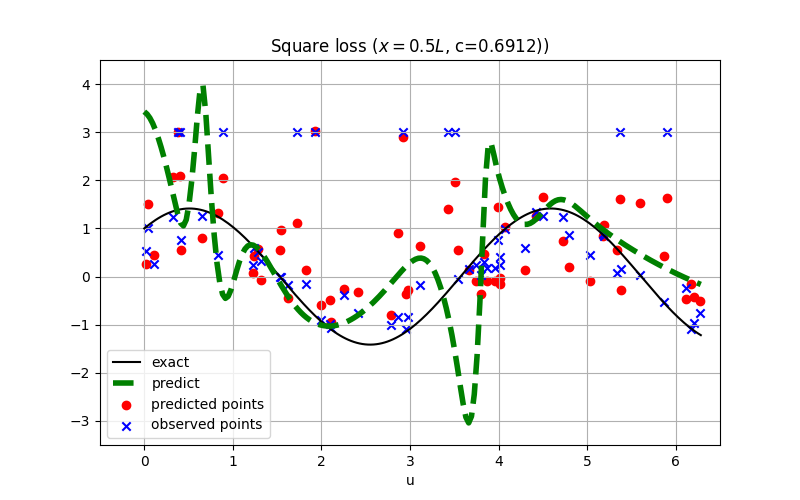
+## Loss Metrics
+
+The final loss in each iteration is represented by
+
+$$
+loss = \sum_i^M \sigma_i \sum_j^{N_{i}} \lambda_{ij}\times\text{area}_{ij}\times\text{Loss}(y_j, y^{pred}_j),
+$$
+where $M$ domains are included, and the $i$-th domain has $N_{i}$ sample points in it.
+- By default, The loss function is set to `square`, and the alternative is `L1`. More types will be implemented later.
+- $\text{area}_{ij}$ is the weight generated by geometric objects automatically.
+- $\sigma_i$ is the weight for the $i$-th domain loss, which is set to `1.` by default.
+- $\lambda_{ij}$ is the weight for each point.
+
+For robust regression, the `L1` loss is usually preferred over the `square` loss.
+The conclusion might also hold for inverse PINN as shown:
+
+
+
+
+
+See `examples/inverse_wave_equation`.
\ No newline at end of file
diff --git a/docs/user/get_started/6_parameterized_poisson.md b/docs/user/get_started/6_parameterized_poisson.md
new file mode 100644
index 0000000..250462b
--- /dev/null
+++ b/docs/user/get_started/6_parameterized_poisson.md
@@ -0,0 +1,40 @@
+# Parameterized Poisson
+We consider an extended problem of [Simple Poisson](1_simple_poisson.md).
+
+$$
+\begin{array}{l}
+-\Delta u=1\\
+\frac{\partial u(x, -1)}{\partial n}=\frac{\partial u(x, 1)}{\partial n}=0 \\
+u(-1,y)=T_l\\
+u(1, y)=0,
+\end{array}
+$$
+where $T_l$ is a design parameter ranging in $(-0.2,0.2)$.
+The target is to train a surrogate that $u_\theta(x,y,T_l)$ gives the temperature at $(x,y)$ when $T_l$ is provided.
+## Train A Surrogate
+In addition, we define the parameter
+
+```python
+temp = sp.Symbol('temp')
+temp_range = {temp: (-0.2, 0.2)}
+```
+
+The usage of `temp` is similar to the time variable in [Burgers' Equation](3_burgers_equation.md).
+`temp_range` should be passed to the argument `param_ranges` in sampling domains.
+
+The left bound value condition is
+```python
+@sc.datanode
+class Left(sc.SampleDomain):
+ # Due to `name` is not specified, Left will be the name of datanode automatically
+ def sampling(self, *args, **kwargs):
+ points = rec.sample_boundary(1000, sieve=(sp.Eq(x, -1.)), param_ranges=temp_range)
+ constraints = sc.Variables({'T': temp})
+ return points, constraints
+```
+
+The result is shown as follows:
+
+
+
+See `examples/parameterized_poisson`.
\ No newline at end of file
diff --git a/docs/user/get_started/7_minimal_surface.md b/docs/user/get_started/7_minimal_surface.md
new file mode 100644
index 0000000..1920060
--- /dev/null
+++ b/docs/user/get_started/7_minimal_surface.md
@@ -0,0 +1,78 @@
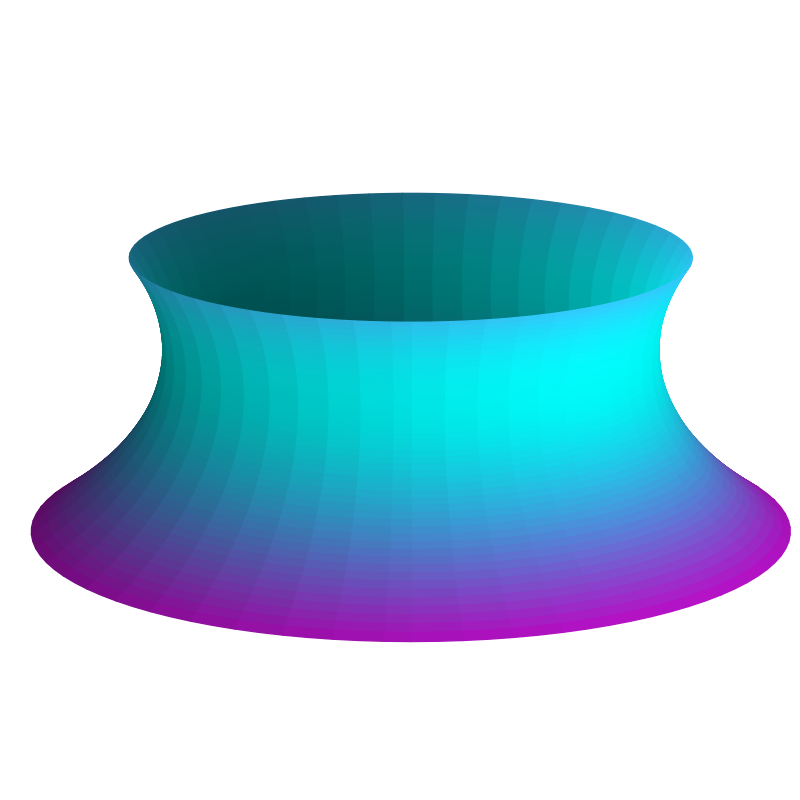
+# Variational Minimization
+IDRLnet can solve variational minimization problems.
+In this section, we try to find a minimal surface of revolution.
+
+Given two points $P_1=(-1, \cosh(-1))$ and $P_2=(0.5, \cosh(0.5))$.
+Consider a curve $u(x)$ connecting $P_1$ and $P_2$.
+The surface of revolution is generated by rotating the curve with respect to x-axis.
+This section aims to find the curve that minimizes the surface area.
+The surface area of revolution is obtained by integrating over cylinders of radius $y$:
+
+$$
+S=\int_{x_1}^{x_2} u(x)\sqrt{u'(x)^2+1}dx.
+$$
+
+## Load a Pretrained Network
+IDRLnet supports loading pretrained networks.
+For faster convergence, we take the initial network to be the segment connecting $P_1$ and $P_2$,
+which is accomplished by fitting the following domain:
+
+```python
+@sc.datanode(loss_fn='L1')
+class Interior(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ points = geo.sample_interior(100)
+ constraints = {'u': (np.cosh(0.5) - np.cosh(-1)) / 1.5 * (x + 1.0) + np.cosh(-1)}
+ return points, constraints
+```
+
+The training procedure is derivative-free, so it converges quite fast.
+
+Starting another script, we load the network trained above as the initial network.
+
+```python
+s = sc.Solver(sample_domains=(Boundary(), Interior(), InteriorInfer()),
+ netnodes=[net],
+ init_network_dirs=['pretrain_network_dir'], # where to find the pretrained network
+ pdes=[dx_exp, integral, ],
+ max_iter=1500)
+```
+
+## Integral Domain
+IDRLnet can calculate definite integration on a domain via Monte Carlo methods.
+
+At the beginning of the script, define `Function` $u$:
+
+```python
+u = sp.Function('u')(x)
+```
+
+The `ICNode` is responsible for numerical integration.
+The output of `ICNode` is automatically prefixed with `integral_`.
+The following code generates a `Node` with output `(integral_dx,)`.
+
+```python
+dx_exp = sc.ExpressionNode(expression=sp.Abs(u) * sp.sqrt((u.diff(x)) ** 2 + 1), name='dx')
+integral = sc.ICNode('dx', dim=1, time=False)
+```
+
+Since the minimization model has an obvious lower bound $0$, we embed the problem into the constraints:
+
+```python
+@sc.datanode(loss_fn='L1')
+class Interior(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ points = geo.sample_interior(10000)
+ constraints = {'integral_dx': 0, }
+ return points, constraints
+```
+
+The iterations are show as follows:
+
+
+
+The exact solution is:
+
+
+
+See `examples/minimal_surface_of_revolution`.
\ No newline at end of file
diff --git a/docs/user/get_started/8_volterra_ide.md b/docs/user/get_started/8_volterra_ide.md
new file mode 100644
index 0000000..e130357
--- /dev/null
+++ b/docs/user/get_started/8_volterra_ide.md
@@ -0,0 +1,42 @@
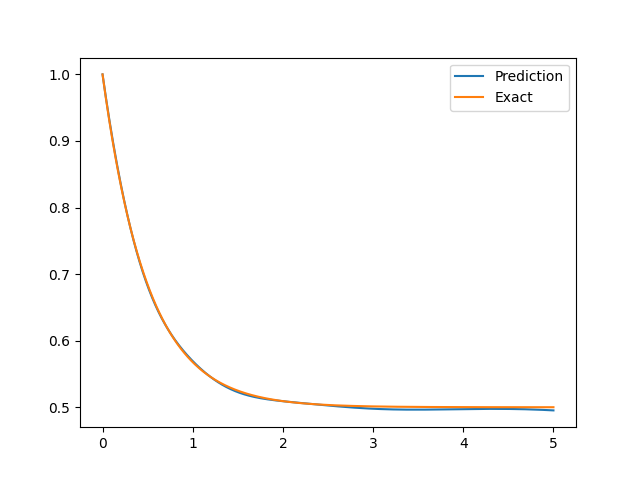
+# Volterra Integral Differential Equation
+We consider the first-order Volterra type integro-differential equation on $[0, 5]$ (from [Lu et al. 2021](https://epubs.siam.org/doi/abs/10.1137/19M1274067)):
+
+$$
+\frac{d y}{d x}+y(x)=\int_{0}^{x} e^{t-x} y(t) d t, \quad y(0)=1
+$$
+with the ground truth $u=\exp(-x) \cosh x$.
+
+## 1D integral with Variable Limits
+The LHS is represented by
+
+```python
+exp_lhs = sc.ExpressionNode(expression=f.diff(x) + f, name='lhs')
+```
+
+The RHS has an integral with variable limits. Therefore, we introduce the class `Int1DNode`:
+
+```python
+fs = sp.Symbol('fs')
+exp_rhs = sc.Int1DNode(expression=sp.exp(s - x) * fs, var=s, lb=0, ub=x, expression_name='rhs',
+ funs={'fs': {'eval': netnode,
+ 'input_map': {'x': 's'},
+ 'output_map': {'f': 'fs'}}},
+ degree=10)
+```
+We map `f` and `x` to `fs` and `s` in the integral, respectively.
+The numerical integration is approximated by Gauss–Legendre quadrature with `degree=10`.
+The difference between the RHS and the LHS is presented by a `pde_op.opterator.Difference` node,
+
+```python
+diff = sc.Difference(T='lhs', S='rhs', dim=1, time=False)
+```
+
+which generates a node with
+- `input=(lhs,rhs)`;
+- `output=(difference_lhs_rhs,)`.
+
+The final result is shown as follows:
+
+
+
+See `examples/Volterra_IDE`.
\ No newline at end of file
diff --git a/docs/user/get_started/tutorial.rst b/docs/user/get_started/tutorial.rst
new file mode 100644
index 0000000..2acf4cf
--- /dev/null
+++ b/docs/user/get_started/tutorial.rst
@@ -0,0 +1,30 @@
+Tutorial
+========
+
+
+To make full use of IDRLnet. We strongly suggest following the following examples:
+
+1. :ref:`Simple Poisson `. This example introduces the primary usage of IDRLnet. Including creating sampling domains, neural
+ networks, partial differential equations, training, monitoring, and inference.
+2. :ref:`Euler-Bernoulli beam `. The example introduces how to use symbols to construct a PDE node efficiently.
+3. :ref:`Burgers' Equation `. The case presents how to include ``time`` in the sampling domains.
+4. :ref:`Allen-Cahn Equation `. The example introduces the representation of periodic boundary conditions.
+ ``Receiver`` acting as ``callbacks`` are also introduced, including implementing user-defined algorithms and post-processing during the training.
+5. :ref:`Inverse wave equation `. The example introduces how to discover unknown parameters in PDEs.
+6. :ref:`Parameterized poisson equation `. The example introduces how to train a surrogate with parameters.
+7. :ref:`Variational Minimization `. The example introduces how to solve variational minimization problems.
+8. :ref:`Volterra integral differential equation `. The example introduces the way to solve IDEs.
+
+
+
+.. toctree::
+ :maxdepth: 2
+
+ 1_simple_poisson
+ 2_euler_beam
+ 3_burgers_equation
+ 4_allen_cahn
+ 5_inverse_wave_equation
+ 6_parameterized_poisson
+ 7_minimal_surface
+ 8_volterra_ide
diff --git a/docs/user/installation.md b/docs/user/installation.md
new file mode 100644
index 0000000..49d3cd5
--- /dev/null
+++ b/docs/user/installation.md
@@ -0,0 +1,14 @@
+# Installation
+
+We recommend using conda to manage the environment.
+Other methods may also work well such like using docker or virtual env.
+## Anaconda
+
+```bash
+git clone https://git.idrl.site/pengwei/idrlnet
+cd idrlnet
+conda create -n idrlnet_dev python=3.8 -y
+conda activate idrlnet_dev
+pip install -r requirements.txt
+pip install -e .
+```
diff --git a/docs/user/team.md b/docs/user/team.md
new file mode 100644
index 0000000..536db92
--- /dev/null
+++ b/docs/user/team.md
@@ -0,0 +1,2 @@
+# The Team
+IDRLnet was developed by members of IDRL laboratory.
\ No newline at end of file
diff --git a/examples/Volterra_IDE/readme.md b/examples/Volterra_IDE/readme.md
new file mode 100644
index 0000000..29f9ffc
--- /dev/null
+++ b/examples/Volterra_IDE/readme.md
@@ -0,0 +1 @@
+See [docs for Volterra IDE](../../docs/user/get_started/8_volterra_ide.md).
\ No newline at end of file
diff --git a/examples/Volterra_IDE/volterra_ide.py b/examples/Volterra_IDE/volterra_ide.py
new file mode 100644
index 0000000..a3b62a4
--- /dev/null
+++ b/examples/Volterra_IDE/volterra_ide.py
@@ -0,0 +1,61 @@
+import idrlnet.shortcut as sc
+import sympy as sp
+import numpy as np
+import matplotlib.pyplot as plt
+
+x = sp.Symbol('x')
+s = sp.Symbol('s')
+f = sp.Function('f')(x)
+geo = sc.Line1D(0, 5)
+
+
+@sc.datanode
+def interior():
+ points = geo.sample_interior(1000)
+ constraints = {"difference_lhs_rhs": 0}
+ return points, constraints
+
+
+@sc.datanode
+def init():
+ points = geo.sample_boundary(1, sieve=sp.Eq(x, 0))
+ points['lambda_f'] = 1000 * np.ones_like(points['x'])
+ constraints = {'f': 1}
+ return points, constraints
+
+
+@sc.datanode(name='InteriorInfer')
+def infer():
+ points = {'x': np.linspace(0, 5, 1000).reshape(-1, 1)}
+ return points, {}
+
+
+netnode = sc.get_net_node(inputs=('x',), outputs=('f',), name='net')
+exp_lhs = sc.ExpressionNode(expression=f.diff(x) + f, name='lhs')
+
+fs = sp.Symbol('fs')
+exp_rhs = sc.Int1DNode(expression=sp.exp(s - x) * fs, var=s, lb=0, ub=x, expression_name='rhs',
+ funs={'fs': {'eval': netnode,
+ 'input_map': {'x': 's'},
+ 'output_map': {'f': 'fs'}}},
+ degree=10)
+diff = sc.Difference(T='lhs', S='rhs', dim=1, time=False)
+
+solver = sc.Solver(sample_domains=(interior(), init(), infer()),
+ netnodes=[netnode],
+ pdes=[exp_lhs, exp_rhs, diff],
+ loading=True,
+ max_iter=3000)
+solver.solve()
+points = solver.infer_step({'InteriorInfer': ['x', 'f']})
+num_x = points['InteriorInfer']['x'].detach().cpu().numpy().ravel()
+num_f = points['InteriorInfer']['f'].detach().cpu().numpy().ravel()
+
+fig = plt.figure(figsize=(8,4))
+plt.plot(num_x, num_f)
+plt.plot(num_x, np.exp(-num_x) * np.cosh(num_x))
+plt.xlabel('x')
+plt.ylabel('y')
+plt.legend(['Prediction', 'Exact'])
+plt.savefig('ide.png', dpi=1000, bbox_inches='tight')
+plt.show()
diff --git a/examples/allen_cahn/allen_cahn.py b/examples/allen_cahn/allen_cahn.py
new file mode 100644
index 0000000..d12f068
--- /dev/null
+++ b/examples/allen_cahn/allen_cahn.py
@@ -0,0 +1,158 @@
+from sympy import Symbol
+import sympy as sp
+import numpy as np
+import matplotlib.pyplot as plt
+import matplotlib.tri as tri
+import idrlnet.shortcut as sc
+import os
+import torch
+
+# parameter phase
+L = 1.
+
+# define geometry
+geo = sc.Line1D(-1.0, 1.0)
+
+# define sympy varaibles to parametize domain curves
+t_symbol = Symbol('t')
+x = Symbol('x')
+u = sp.Function('u')(x, t_symbol)
+up = sp.Function('up')(x, t_symbol)
+time_range = {t_symbol: (0, L)}
+
+
+# constraint phase
+@sc.datanode
+class AllenInit(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ return geo.sample_interior(density=300, param_ranges={t_symbol: 0.0}), \
+ {'u': x ** 2 * sp.cos(sp.pi * x), 'lambda_u': 100}
+
+
+@sc.datanode
+class AllenBc(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ return geo.sample_boundary(density=200, sieve=sp.Eq(x, -1), param_ranges=time_range), \
+ {'difference_u_up': 0,
+ 'difference_diff_u_diff_up': 0,
+ }
+
+
+@sc.datanode(name='allen_domain')
+class AllenEq(sc.SampleDomain):
+ def __init__(self):
+ self.points = geo.sample_interior(density=2000, param_ranges=time_range, low_discrepancy=True)
+
+ def sampling(self, *args, **kwargs):
+ constraints = {'AllenCahn_u': 0}
+ return self.points, constraints
+
+
+@sc.datanode(name='data_evaluate')
+class AllenPointsInference(sc.SampleDomain):
+ def __init__(self):
+ self.points = geo.sample_interior(density=5000, param_ranges=time_range, low_discrepancy=True)
+ self.points = sc.Variables(self.points).to_torch_tensor_()
+ self.constraints = {'AllenCahn_u': torch.zeros_like(self.points['x'])}
+
+ def sampling(self, *args, **kwargs):
+ return self.points, self.constraints
+
+
+@sc.datanode(name='re_sampling_domain')
+class SpaceAdaptiveSampling(sc.SampleDomain):
+ def __init__(self):
+ self.points = geo.sample_interior(density=100, param_ranges=time_range, low_discrepancy=True)
+ self.points = sc.Variables(self.points).to_torch_tensor_()
+ self.constraints = {'AllenCahn_u': torch.zeros_like(self.points['x'])}
+
+ def sampling(self, *args, **kwargs):
+ return self.points, self.constraints
+
+
+@sc.datanode(name='allen_test')
+def generate_plot_data():
+ x = np.linspace(-1.0, 1.0, 100)
+ t = np.linspace(0, 1.0, 100)
+ x, t = np.meshgrid(x, t)
+ points = sc.Variables(x=x.reshape(-1, 1), t=t.reshape(-1, 1))
+ return points, {}
+
+
+# computational node phase
+
+net_u = sc.MLP([2, 128, 128, 128, 128, 2], activation=sc.Activation.tanh)
+net_u = sc.NetNode(inputs=('x', 't',), outputs=('u',), name='net1', net=net_u)
+xp = sc.ExpressionNode(name='xp', expression=x + 2)
+get_tilde_u = sc.get_shared_net_node(net_u, inputs=('xp', 't',), outputs=('up',), name='net2', arch='mlp')
+
+diff_u = sc.ExpressionNode(expression=u.diff(x), name='diff_u')
+diff_up = sc.ExpressionNode(expression=up.diff(x), name='diff_up')
+
+pde = sc.AllenCahnNode(u='u', gamma_1=0.0001, gamma_2=5)
+
+boundary_up = sc.Difference(T='diff_u', S='diff_up')
+boundary_u = sc.Difference(T='u', S='up')
+
+
+# Receiver hook phase
+
+class SpaceAdaptiveReceiver(sc.Receiver):
+ def receive_notify(self, solver, message):
+ if sc.Signal.TRAIN_PIPE_END in message.keys() and solver.global_step % 1000 == 0:
+ sc.logger.info('space adaptive sampling...')
+ results = solver.infer_step({'data_evaluate': ['x', 't', 'sdf', 'AllenCahn_u']})
+ residual_data = results['data_evaluate']['AllenCahn_u'].detach().cpu().numpy().ravel()
+ # sort the points by residual loss
+ index = np.argsort(-1. * np.abs(residual_data))[:200]
+ _points = {key: values[index].detach().cpu().numpy() for key, values in results['data_evaluate'].items()}
+ _points.pop('AllenCahn_u')
+ _points['area'] = np.zeros_like(_points['sdf']) + (1.0 / 200)
+ solver.set_domain_parameter('re_sampling_domain', {'points': _points})
+
+
+class PostProcessReceiver(sc.Receiver):
+ def __init__(self):
+ if not os.path.exists('image'):
+ os.mkdir('image')
+
+ def receive_notify(self, solver, message):
+ if sc.Signal.TRAIN_PIPE_END in message.keys() and solver.global_step % 1000 == 1:
+ sc.logger.info('Post Processing...')
+ points = s.infer_step({'allen_test': ['x', 't', 'u']})
+ triang_total = tri.Triangulation(points['allen_test']['t'].detach().cpu().numpy().ravel(),
+ points['allen_test']['x'].detach().cpu().numpy().ravel(), )
+ plt.tricontourf(triang_total, points['allen_test']['u'].detach().cpu().numpy().ravel(), 100, vmin=-1,
+ vmax=1)
+ tc_bar = plt.colorbar()
+ tc_bar.ax.tick_params(labelsize=12)
+
+ _points = solver.get_domain_parameter('re_sampling_domain', 'points')
+ if not isinstance(_points['t'], torch.Tensor):
+ plt.scatter(_points['t'].ravel(), _points['x'].ravel(), marker='x', s=8)
+ else:
+ plt.scatter(_points['t'].detach().cpu().numpy().ravel(),
+ _points['x'].detach().cpu().numpy().ravel(), marker='x', s=8)
+
+ plt.xlabel('$t$')
+ plt.ylabel('$x$')
+ plt.title('$u(x,t)$')
+ plt.savefig(f'image/result_{solver.global_step}.png')
+ plt.show()
+
+
+# Solver phase
+s = sc.Solver(sample_domains=(AllenInit(),
+ AllenBc(),
+ AllenEq(),
+ AllenPointsInference(),
+ SpaceAdaptiveSampling(),
+ generate_plot_data()),
+ netnodes=[net_u, get_tilde_u],
+ pdes=[pde, xp, diff_up, diff_u, boundary_up, boundary_u],
+ max_iter=60000,
+ loading=True)
+
+s.register_receiver(SpaceAdaptiveReceiver())
+s.register_receiver(PostProcessReceiver())
+s.solve()
diff --git a/examples/allen_cahn/readme.md b/examples/allen_cahn/readme.md
new file mode 100644
index 0000000..2fb85ae
--- /dev/null
+++ b/examples/allen_cahn/readme.md
@@ -0,0 +1 @@
+See [docs for Allen-Cahn](../../docs/user/get_started/4_allen_cahn.md).
\ No newline at end of file
diff --git a/examples/burgers_equation/burgers_equation.py b/examples/burgers_equation/burgers_equation.py
new file mode 100644
index 0000000..6758d11
--- /dev/null
+++ b/examples/burgers_equation/burgers_equation.py
@@ -0,0 +1,66 @@
+from sympy import Symbol, sin
+import math
+import matplotlib.pyplot as plt
+import matplotlib.tri as tri
+import idrlnet.shortcut as sc
+
+x = Symbol('x')
+t_symbol = Symbol('t')
+time_range = {t_symbol: (0, 1)}
+geo = sc.Line1D(-1., 1.)
+
+
+@sc.datanode(name='burgers_equation')
+def interior_domain():
+ points = geo.sample_interior(10000, bounds={x: (-1., 1.)}, param_ranges=time_range)
+ constraints = {'burgers_u': 0}
+ return points, constraints
+
+
+@sc.datanode(name='t_boundary')
+def init_domain():
+ points = geo.sample_interior(100, param_ranges={t_symbol: 0.0})
+ constraints = sc.Variables({'u': -sin(math.pi * x)})
+ return points, constraints
+
+
+@sc.datanode(name="x_boundary")
+def boundary_domain():
+ points = geo.sample_boundary(100, param_ranges=time_range)
+ constraints = sc.Variables({'u': 0})
+ return points, constraints
+
+
+net = sc.get_net_node(inputs=('x', 't',), outputs=('u',), name='net1', arch=sc.Arch.mlp)
+pde = sc.BurgersNode(u='u', v=0.01 / math.pi)
+s = sc.Solver(sample_domains=(interior_domain(), init_domain(), boundary_domain()),
+ netnodes=[net], pdes=[pde], max_iter=4000)
+s.solve()
+
+coord = s.infer_step({'burgers_equation': ['x', 't', 'u'], 't_boundary': ['x', 't'],
+ 'x_boundary': ['x', 't']})
+num_x = coord['burgers_equation']['x'].cpu().detach().numpy().ravel()
+num_t = coord['burgers_equation']['t'].cpu().detach().numpy().ravel()
+num_u = coord['burgers_equation']['u'].cpu().detach().numpy().ravel()
+
+init_x = coord['t_boundary']['x'].cpu().detach().numpy().ravel()
+init_t = coord['t_boundary']['t'].cpu().detach().numpy().ravel()
+boundary_x = coord['x_boundary']['x'].cpu().detach().numpy().ravel()
+boundary_t = coord['x_boundary']['t'].cpu().detach().numpy().ravel()
+
+triang_total = tri.Triangulation(num_t.flatten(), num_x.flatten())
+u_pre = num_u.flatten()
+
+fig = plt.figure(figsize=(15, 5))
+ax1 = fig.add_subplot(221)
+tcf = ax1.tricontourf(triang_total, u_pre, 100, cmap='jet')
+tc_bar = plt.colorbar(tcf)
+tc_bar.ax.tick_params(labelsize=10)
+ax1.set_xlabel('$t$')
+ax1.set_ylabel('$x$')
+ax1.set_title('$u(x,t)$')
+ax1.scatter(init_t, init_x, c='black', marker='x', s=8)
+ax1.scatter(boundary_t, boundary_x, c='black', marker='x', s=8)
+plt.xlim(0, 1)
+plt.ylim(-1, 1)
+plt.savefig('Burgers.png', dpi=500, bbox_inches='tight', pad_inches=0.02)
diff --git a/examples/burgers_equation/readme.md b/examples/burgers_equation/readme.md
new file mode 100644
index 0000000..558c085
--- /dev/null
+++ b/examples/burgers_equation/readme.md
@@ -0,0 +1 @@
+See [docs for Burgers' equations](../../docs/user/get_started/3_burgers_equation.md).
\ No newline at end of file
diff --git a/examples/euler_beam/euler_beam.py b/examples/euler_beam/euler_beam.py
new file mode 100644
index 0000000..ac805f5
--- /dev/null
+++ b/examples/euler_beam/euler_beam.py
@@ -0,0 +1,78 @@
+import matplotlib.pyplot as plt
+import sympy as sp
+import numpy as np
+import idrlnet.shortcut as sc
+
+x = sp.symbols('x')
+Line = sc.Line1D(0, 1)
+y = sp.Function('y')(x)
+
+
+@sc.datanode(name='interior')
+class Interior(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ return Line.sample_interior(1000), {'dddd_y': 0}
+
+
+@sc.datanode(name='left_boundary1')
+class LeftBoundary1(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ return Line.sample_boundary(100, sieve=(sp.Eq(x, 0))), {'y': 0}
+
+
+@sc.datanode(name='left_boundary2')
+class LeftBoundary2(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ return Line.sample_boundary(100, sieve=(sp.Eq(x, 0))), {'d_y': 0}
+
+
+@sc.datanode(name='right_boundary1')
+class RightBoundary1(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ return Line.sample_boundary(100, sieve=(sp.Eq(x, 1))), {'dd_y': 0}
+
+
+@sc.datanode(name='right_boundary2')
+class RightBoundary2(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ return Line.sample_boundary(100, sieve=(sp.Eq(x, 1))), {'ddd_y': 0}
+
+
+@sc.datanode(name='infer')
+class Infer(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ return {'x': np.linspace(0, 1, 1000).reshape(-1, 1)}, {}
+
+
+net = sc.get_net_node(inputs=('x',), outputs=('y',), name='net', arch=sc.Arch.mlp)
+
+pde1 = sc.ExpressionNode(name='dddd_y', expression=y.diff(x).diff(x).diff(x).diff(x) + 1)
+pde2 = sc.ExpressionNode(name='d_y', expression=y.diff(x))
+pde3 = sc.ExpressionNode(name='dd_y', expression=y.diff(x).diff(x))
+pde4 = sc.ExpressionNode(name='ddd_y', expression=y.diff(x).diff(x).diff(x))
+
+solver = sc.Solver(
+ sample_domains=(Interior(), LeftBoundary1(), LeftBoundary2(), RightBoundary1(), RightBoundary2()),
+ netnodes=[net],
+ pdes=[pde1, pde2, pde3, pde4],
+ max_iter=2000)
+solver.solve()
+
+
+# inference
+def exact(x):
+ return -(x ** 4) / 24 + x ** 3 / 6 - x ** 2 / 4
+
+
+solver.sample_domains = (Infer(),)
+points = solver.infer_step({'infer': ['x', 'y']})
+xs = points['infer']['x'].detach().cpu().numpy().ravel()
+y_pred = points['infer']['y'].detach().cpu().numpy().ravel()
+plt.plot(xs, y_pred, label='Pred')
+y_exact = exact(xs)
+plt.plot(xs, y_exact, label='Exact', linestyle='--')
+plt.legend()
+plt.xlabel('x')
+plt.ylabel('w')
+plt.savefig('Euler_beam.png', dpi=300, bbox_inches='tight')
+plt.show()
diff --git a/examples/euler_beam/readme.md b/examples/euler_beam/readme.md
new file mode 100644
index 0000000..eec452b
--- /dev/null
+++ b/examples/euler_beam/readme.md
@@ -0,0 +1 @@
+See [docs for Euler–Bernoulli beam](../../docs/user/get_started/2_euler_beam.md)
\ No newline at end of file
diff --git a/examples/inverse_wave_equation/inverse_wave_equation.py b/examples/inverse_wave_equation/inverse_wave_equation.py
new file mode 100644
index 0000000..62ed14d
--- /dev/null
+++ b/examples/inverse_wave_equation/inverse_wave_equation.py
@@ -0,0 +1,113 @@
+import idrlnet.shortcut as sc
+from math import pi
+from sympy import Symbol
+import torch
+import numpy as np
+import pandas as pd
+import os
+import matplotlib.pyplot as plt
+
+L = float(pi)
+
+geo = sc.Line1D(0, L)
+t_symbol = Symbol('t')
+x = Symbol('x')
+time_range = {t_symbol: (0, 2 * L)}
+c = 1.54
+external_filename = 'external_sample.csv'
+
+
+def generate_observed_data():
+ if os.path.exists(external_filename):
+ return
+ points = geo.sample_interior(density=20,
+ bounds={x: (0, L)},
+ param_ranges=time_range,
+ low_discrepancy=True)
+ points['u'] = np.sin(points['x']) * (np.sin(c * points['t']) + np.cos(c * points['t']))
+ points['u'][np.random.choice(len(points['u']), 10, replace=False)] = 3.
+ points = {k: v.ravel() for k, v in points.items()}
+ points = pd.DataFrame.from_dict(points)
+ points.to_csv('external_sample.csv', index=False)
+
+
+generate_observed_data()
+
+
+# @sc.datanode(name='wave_domain')
+@sc.datanode(name='wave_domain', loss_fn='L1')
+class WaveExternal(sc.SampleDomain):
+ def __init__(self):
+ points = pd.read_csv('external_sample.csv')
+ self.points = {col: points[col].to_numpy().reshape(-1, 1) for col in points.columns}
+ self.constraints = {'u': self.points.pop('u')}
+
+ def sampling(self, *args, **kwargs):
+ return self.points, self.constraints
+
+
+@sc.datanode(name='wave_external')
+class WaveEq(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ points = geo.sample_interior(density=1000, bounds={x: (0, L)}, param_ranges=time_range)
+ constraints = {'wave_equation': 0.}
+ return points, constraints
+
+
+@sc.datanode(name='center_infer')
+class CenterInfer(sc.SampleDomain):
+ def __init__(self):
+ self.points = sc.Variables()
+ self.points['t'] = np.linspace(0, 2 * L, 200).reshape(-1, 1)
+ self.points['x'] = np.ones_like(self.points['t']) * L / 2
+ self.points['area'] = np.ones_like(self.points['t'])
+
+ def sampling(self, *args, **kwargs):
+ return self.points, {}
+
+
+net = sc.get_net_node(inputs=('x', 't',), outputs=('u',), name='net1', arch=sc.Arch.mlp)
+var_c = sc.get_net_node(inputs=('x',), outputs=('c',), arch=sc.Arch.single_var)
+pde = sc.WaveNode(c='c', dim=1, time=True, u='u')
+s = sc.Solver(sample_domains=(WaveExternal(), WaveEq()),
+ netnodes=[net, var_c],
+ pdes=[pde],
+ # network_dir='square_network_dir',
+ network_dir='network_dir',
+ max_iter=5000)
+s.solve()
+
+_, ax = plt.subplots(1, 1, figsize=(8, 4))
+
+coord = s.infer_step(domain_attr={'wave_domain': ['x', 't', 'u']})
+num_t = coord['wave_domain']['t'].cpu().detach().numpy().ravel()
+num_u = coord['wave_domain']['u'].cpu().detach().numpy().ravel()
+ax.scatter(num_t, num_u, c='r', marker='o', label='predicted points')
+
+print("true paratmeter c: {:.4f}".format(c))
+predict_c = var_c.evaluate(torch.Tensor([[1.0]])).item()
+print("predicted parameter c: {:.4f}".format(predict_c))
+
+num_t = WaveExternal().sample_fn.points['t'].ravel()
+num_u = WaveExternal().sample_fn.constraints['u'].ravel()
+ax.scatter(num_t, num_u, c='b', marker='x', label='observed points')
+
+s.sample_domains = (CenterInfer(),)
+points = s.infer_step({'center_infer': ['t', 'x', 'u']})
+num_t = points['center_infer']['t'].cpu().detach().numpy().ravel()
+num_u = points['center_infer']['u'].cpu().detach().numpy().ravel()
+num_x = points['center_infer']['x'].cpu().detach().numpy().ravel()
+ax.plot(num_t, np.sin(num_x) * (np.sin(c * num_t) + np.cos(c * num_t)), c='k', label='exact')
+ax.plot(num_t, num_u, '--', c='g', linewidth=4, label='predict')
+ax.legend()
+ax.set_xlabel('t')
+ax.set_ylabel('u')
+# ax.set_title(f'Square loss ($x=0.5L$, c={predict_c:.4f}))')
+ax.set_title(f'L1 loss ($x=0.5L$, c={predict_c:.4f})')
+ax.grid(True)
+ax.set_xlim([-0.5, 6.5])
+ax.set_ylim([-3.5, 4.5])
+# plt.savefig('square.png', dpi=1000, bbox_inches='tight', pad_inches=0.02)
+plt.savefig('L1.png', dpi=1000, bbox_inches='tight', pad_inches=0.02)
+plt.show()
+plt.close()
diff --git a/examples/inverse_wave_equation/readme.md b/examples/inverse_wave_equation/readme.md
new file mode 100644
index 0000000..d8ecc29
--- /dev/null
+++ b/examples/inverse_wave_equation/readme.md
@@ -0,0 +1 @@
+See [docs for inverse wave equation](../../docs/user/get_started/5_inverse_wave_equation.md)
\ No newline at end of file
diff --git a/examples/minimal_surface_of_revolution/minimal_surface_of_revolution.py b/examples/minimal_surface_of_revolution/minimal_surface_of_revolution.py
new file mode 100644
index 0000000..df3d8d5
--- /dev/null
+++ b/examples/minimal_surface_of_revolution/minimal_surface_of_revolution.py
@@ -0,0 +1,143 @@
+import matplotlib.pyplot as plt
+from matplotlib import cm
+import numpy as np
+import os
+import sympy as sp
+from typing import Dict
+import pickle
+import math
+
+import idrlnet.shortcut as sc
+
+x = sp.Symbol('x')
+u = sp.Function('u')(x)
+geo = sc.Line1D(-1, 0.5)
+
+
+@sc.datanode(sigma=1000.)
+class Boundary(sc.SampleDomain):
+ def __init__(self):
+ self.points = geo.sample_boundary(1, )
+ self.constraints = {'u': np.cosh(self.points['x'])}
+
+ def sampling(self, *args, **kwargs):
+ return self.points, self.constraints
+
+
+@sc.datanode(loss_fn='L1')
+class Interior(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ points = geo.sample_interior(10000)
+ constraints = {'integral_dx': 0, }
+ return points, constraints
+
+
+@sc.datanode
+class InteriorInfer(sc.SampleDomain):
+ def __init__(self):
+ self.points = sc.Variables()
+ self.points['x'] = np.linspace(-1, 0.5, 1001, endpoint=True).reshape(-1, 1)
+ self.points['area'] = np.ones_like(self.points['x'])
+
+ def sampling(self, *args, **kwargs):
+ return self.points, {}
+
+
+# plot Intermediate results
+class PlotReceiver(sc.Receiver):
+ def __init__(self):
+ if not os.path.exists('plot'):
+ os.mkdir('plot')
+ xx = np.linspace(-1, 0.5, 1001, endpoint=True)
+ self.xx = xx
+ angle = np.linspace(0, math.pi * 2, 100)
+ yy = np.cosh(xx)
+
+ xx_mesh, angle_mesh = np.meshgrid(xx, angle)
+ yy_mesh = yy * np.cos(angle_mesh)
+ zz_mesh = yy * np.sin(angle_mesh)
+
+ fig = plt.figure(figsize=(8, 8))
+ ax = fig.gca(projection='3d')
+ ax.set_zlim3d(-1.25 - 1, 0.75 + 1)
+ ax.set_ylim3d(-2, 2)
+ ax.set_xlim3d(-2, 2)
+
+ my_col = cm.cool((yy * np.ones_like(angle_mesh) - 1.0) / 0.6)
+ ax.plot_surface(yy_mesh, zz_mesh, xx_mesh, facecolors=my_col)
+ ax.view_init(elev=15., azim=0)
+ ax.dist = 5
+ plt.axis('off')
+ plt.tight_layout(pad=0., w_pad=0., h_pad=.0)
+ plt.savefig(f'plot/p_exact.png')
+ plt.show()
+ plt.close()
+ self.predict_history = []
+
+ def receive_notify(self, obj: sc.Solver, message: Dict):
+ if sc.Signal.SOLVE_START in message or (sc.Signal.TRAIN_PIPE_END in message and obj.global_step % 200 == 0):
+ print("plotting")
+ points = s.infer_step({'InteriorInfer': ['x', 'u']})
+ num_x = points['InteriorInfer']['x'].detach().cpu().numpy().ravel()
+ num_u = points['InteriorInfer']['u'].detach().cpu().numpy().ravel()
+ angle = np.linspace(0, math.pi * 2, 100)
+
+ xx_mesh, angle_mesh = np.meshgrid(num_x, angle)
+ yy_mesh = num_u * np.cos(angle_mesh)
+ zz_mesh = num_u * np.sin(angle_mesh)
+
+ fig = plt.figure(figsize=(8, 8))
+ ax = fig.gca(projection='3d')
+ ax.set_zlim3d(-1.25 - 1, 0.75 + 1)
+ ax.set_ylim3d(-2, 2)
+ ax.set_xlim3d(-2, 2)
+
+ my_col = cm.cool((num_u * np.ones_like(angle_mesh) - 1.0) / 0.6)
+ ax.plot_surface(yy_mesh, zz_mesh, xx_mesh, facecolors=my_col)
+ ax.view_init(elev=15., azim=0)
+ ax.dist = 5
+ plt.axis('off')
+ plt.tight_layout(pad=0., w_pad=0., h_pad=.0)
+ plt.savefig(f'plot/p_{obj.global_step}.png')
+ plt.show()
+ plt.close()
+
+ self.predict_history.append((num_u, obj.global_step))
+ if sc.Signal.SOLVE_END in message:
+ try:
+ with open('result.pickle', 'rb') as f:
+ self.predict_history = pickle.load(f)
+ except:
+ with open('result.pickle', 'wb') as f:
+ pickle.dump(self.predict_history, f)
+ for yy, step in self.predict_history:
+ if step == 0:
+ plt.plot(yy, self.xx, label=f"iter={step}")
+ if step == 200:
+ plt.plot(yy, self.xx, label=f"iter={step}")
+ if step == 800:
+ plt.plot(yy[::100], self.xx[::100], '-o', label=f"iter={step}")
+ plt.plot(np.cosh(self.xx)[::100], self.xx[::100], '-x', label='exact')
+ plt.plot([0, np.cosh(-1)], [-1, -1], '--', color='gray')
+ plt.plot([0, np.cosh(0.5)], [0.5, 0.5], '--', color='gray')
+ plt.legend()
+ plt.xlim([0, 1.7])
+ plt.xlabel('y')
+ plt.ylabel('x')
+ plt.savefig('iterations.png')
+ plt.show()
+ plt.close()
+
+
+dx_exp = sc.ExpressionNode(expression=sp.Abs(u) * sp.sqrt((u.diff(x)) ** 2 + 1), name='dx')
+net = sc.get_net_node(inputs=('x',), outputs=('u',), name='net', arch=sc.Arch.mlp)
+
+integral = sc.ICNode('dx', dim=1, time=False)
+
+s = sc.Solver(sample_domains=(Boundary(), Interior(), InteriorInfer()),
+ netnodes=[net],
+ init_network_dirs=['pretrain_network_dir'],
+ pdes=[dx_exp, integral, ],
+ max_iter=1500)
+s.register_receiver(PlotReceiver())
+s.solve()
diff --git a/examples/minimal_surface_of_revolution/minimal_surface_of_revolution_pretrain.py b/examples/minimal_surface_of_revolution/minimal_surface_of_revolution_pretrain.py
new file mode 100644
index 0000000..48c8b7c
--- /dev/null
+++ b/examples/minimal_surface_of_revolution/minimal_surface_of_revolution_pretrain.py
@@ -0,0 +1,35 @@
+import matplotlib.pyplot as plt
+import numpy as np
+import sympy as sp
+import idrlnet.shortcut as sc
+
+x = sp.Symbol('x')
+geo = sc.Line1D(-1, 0.5)
+
+
+@sc.datanode(loss_fn='L1')
+class Interior(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ points = geo.sample_interior(100)
+ constraints = {'u': (np.cosh(0.5) - np.cosh(-1)) / 1.5 * (x + 1.0) + np.cosh(-1)}
+ return points, constraints
+
+
+net = sc.get_net_node(inputs=('x',), outputs=('u',), name='net', arch=sc.Arch.mlp)
+
+s = sc.Solver(sample_domains=(Interior(),),
+ netnodes=[net],
+ pdes=[],
+ network_dir='pretrain_network_dir',
+ max_iter=1000)
+s.solve()
+
+points = s.infer_step({'Interior': ['x', 'u']})
+num_x = points['Interior']['x'].detach().cpu().numpy().ravel()
+num_u = points['Interior']['u'].detach().cpu().numpy().ravel()
+
+xx = np.linspace(-1, 0.5, 1000, endpoint=True)
+yy = np.cosh(xx)
+plt.plot(xx, yy)
+plt.plot(num_x, num_u)
+plt.show()
diff --git a/examples/minimal_surface_of_revolution/readme.md b/examples/minimal_surface_of_revolution/readme.md
new file mode 100644
index 0000000..9a0e4a9
--- /dev/null
+++ b/examples/minimal_surface_of_revolution/readme.md
@@ -0,0 +1,5 @@
+1. run `python minimal_surface_of_revolution_pretrain.py`
+2. run `python minimal_surface_of_revolution.py`
+
+See [docs for minimal surface](../../docs/user/get_started/7_minimal_surface.md)
+
diff --git a/examples/parameterized_poisson/parameterized_poisson.py b/examples/parameterized_poisson/parameterized_poisson.py
new file mode 100644
index 0000000..d78d952
--- /dev/null
+++ b/examples/parameterized_poisson/parameterized_poisson.py
@@ -0,0 +1,92 @@
+import idrlnet.shortcut as sc
+import sympy as sp
+import matplotlib.pyplot as plt
+import matplotlib.tri as tri
+import numpy as np
+
+x, y = sp.symbols('x y')
+temp = sp.Symbol('temp')
+temp_range = {temp: (-0.2, 0.2)}
+rec = sc.Rectangle((-1., -1.), (1., 1.))
+
+
+@sc.datanode
+class Right(sc.SampleDomain):
+ # Due to `name` is not specified, Right will be the name of datanode automatically
+ def sampling(self, *args, **kwargs):
+ points = rec.sample_boundary(1000, sieve=(sp.Eq(x, 1.)), param_ranges=temp_range)
+ constraints = sc.Variables({'T': 0.})
+ return points, constraints
+
+
+@sc.datanode
+class Left(sc.SampleDomain):
+ # Due to `name` is not specified, Left will be the name of datanode automatically
+ def sampling(self, *args, **kwargs):
+ points = rec.sample_boundary(1000, sieve=(sp.Eq(x, -1.)), param_ranges=temp_range)
+ constraints = sc.Variables({'T': temp})
+ return points, constraints
+
+
+@sc.datanode(name="up_down")
+class UpDownBoundaryDomain(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ points = rec.sample_boundary(1000, sieve=((x > -1.) & (x < 1.)), param_ranges=temp_range)
+ constraints = sc.Variables({'normal_gradient_T': 0.})
+ return points, constraints
+
+
+@sc.datanode(name="heat_domain")
+class HeatDomain(sc.SampleDomain):
+ def __init__(self):
+ self.points = 1000
+
+ def sampling(self, *args, **kwargs):
+ points = rec.sample_interior(self.points, param_ranges=temp_range)
+ constraints = sc.Variables({'diffusion_T': 1.})
+ return points, constraints
+
+
+net = sc.get_net_node(inputs=('x', 'y', 'temp'), outputs=('T',), name='net1', arch=sc.Arch.mlp)
+pde = sc.DiffusionNode(T='T', D=1., Q=0., dim=2, time=False)
+grad = sc.NormalGradient('T', dim=2, time=False)
+s = sc.Solver(sample_domains=(HeatDomain(), Left(), Right(), UpDownBoundaryDomain()),
+ netnodes=[net],
+ pdes=[pde, grad],
+ max_iter=3000)
+s.solve()
+
+
+def infer_temp(temp_num, file_suffix=None):
+ temp_range[temp] = temp_num
+ s.set_domain_parameter('heat_domain', {'points': 10000})
+ coord = s.infer_step({'heat_domain': ['x', 'y', 'T']})
+ num_x = coord['heat_domain']['x'].cpu().detach().numpy().ravel()
+ num_y = coord['heat_domain']['y'].cpu().detach().numpy().ravel()
+ num_Tp = coord['heat_domain']['T'].cpu().detach().numpy().ravel()
+
+ # Ground truth
+ num_T = -(num_x + 1 + temp_num) * (num_x - 1.) / 2
+
+ fig, ax = plt.subplots(1, 3, figsize=(10, 3))
+ triang_total = tri.Triangulation(num_x, num_y)
+ ax[0].tricontourf(triang_total, num_Tp, 100, cmap='hot', vmin=-0.2, vmax=1.21 / 2)
+ ax[0].axis('off')
+ ax[0].set_title(f'prediction($T_l={temp_num:.2f}$)')
+ ax[1].tricontourf(triang_total, num_T, 100, cmap='hot', vmin=-0.2, vmax=1.21 / 2)
+ ax[1].axis('off')
+ ax[1].set_title(f'ground truth($T_l={temp_num:.2f}$)')
+ ax[2].tricontourf(triang_total, np.abs(num_T - num_Tp), 100, cmap='hot', vmin=0, vmax=1.21 / 2)
+ ax[2].axis('off')
+ ax[2].set_title('absolute error')
+ if file_suffix is None:
+ plt.savefig(f'poisson_{temp_num:.2f}.png', dpi=300, bbox_inches='tight')
+ plt.show()
+ else:
+ plt.savefig(f'poisson_{file_suffix}.png', dpi=300, bbox_inches='tight')
+ plt.show()
+
+
+for i in range(41):
+ temp_num = i / 100 - 0.2
+ infer_temp(temp_num, file_suffix=i)
diff --git a/examples/parameterized_poisson/readme.md b/examples/parameterized_poisson/readme.md
new file mode 100644
index 0000000..522de4f
--- /dev/null
+++ b/examples/parameterized_poisson/readme.md
@@ -0,0 +1 @@
+See [docs for Parameterized Poisson](../../docs/user/get_started/6_parameterized_poisson.md).
\ No newline at end of file
diff --git a/examples/simple_poisson/readme.md b/examples/simple_poisson/readme.md
new file mode 100644
index 0000000..f9d9bf6
--- /dev/null
+++ b/examples/simple_poisson/readme.md
@@ -0,0 +1 @@
+See [docs for Simple Poisson](../../docs/user/get_started/1_simple_poisson.md).
\ No newline at end of file
diff --git a/examples/simple_poisson/simple_poisson.py b/examples/simple_poisson/simple_poisson.py
new file mode 100644
index 0000000..6c0f8f2
--- /dev/null
+++ b/examples/simple_poisson/simple_poisson.py
@@ -0,0 +1,70 @@
+import idrlnet.shortcut as sc
+import sympy as sp
+import matplotlib.pyplot as plt
+import matplotlib.tri as tri
+import numpy as np
+
+x, y = sp.symbols('x y')
+rec = sc.Rectangle((-1., -1.), (1., 1.))
+
+
+@sc.datanode
+class LeftRight(sc.SampleDomain):
+ # Due to `name` is not specified, LeftRight will be the name of datanode automatically
+ def sampling(self, *args, **kwargs):
+ points = rec.sample_boundary(1000, sieve=((y > -1.) & (y < 1.)))
+ constraints = {'T': 0.}
+ return points, constraints
+
+
+@sc.datanode(name="up_down")
+class UpDownBoundaryDomain(sc.SampleDomain):
+ def sampling(self, *args, **kwargs):
+ points = rec.sample_boundary(1000, sieve=((x > -1.) & (x < 1.)))
+ constraints = {'normal_gradient_T': 0.}
+ return points, constraints
+
+
+@sc.datanode(name="heat_domain")
+class HeatDomain(sc.SampleDomain):
+ def __init__(self):
+ self.points = 1000
+
+ def sampling(self, *args, **kwargs):
+ points = rec.sample_interior(self.points)
+ constraints = {'diffusion_T': 1.}
+ return points, constraints
+
+
+net = sc.get_net_node(inputs=('x', 'y',), outputs=('T',), name='net1', arch=sc.Arch.mlp)
+pde = sc.DiffusionNode(T='T', D=1., Q=0., dim=2, time=False)
+grad = sc.NormalGradient('T', dim=2, time=False)
+s = sc.Solver(sample_domains=(HeatDomain(), LeftRight(), UpDownBoundaryDomain()),
+ netnodes=[net],
+ pdes=[pde, grad],
+ max_iter=1000)
+s.solve()
+
+# Inference
+s.set_domain_parameter('heat_domain', {'points': 10000})
+coord = s.infer_step({'heat_domain': ['x', 'y', 'T']})
+num_x = coord['heat_domain']['x'].cpu().detach().numpy().ravel()
+num_y = coord['heat_domain']['y'].cpu().detach().numpy().ravel()
+num_Tp = coord['heat_domain']['T'].cpu().detach().numpy().ravel()
+
+# Ground truth
+num_T = -num_x * num_x / 2 + 0.5
+
+fig, ax = plt.subplots(1, 3, figsize=(10, 3))
+triang_total = tri.Triangulation(num_x, num_y)
+ax[0].tricontourf(triang_total, num_Tp, 100, cmap='hot', vmin=0, vmax=0.5)
+ax[0].axis('off')
+ax[0].set_title('prediction')
+ax[1].tricontourf(triang_total, num_T, 100, cmap='hot', vmin=0, vmax=0.5)
+ax[1].axis('off')
+ax[1].set_title('ground truth')
+ax[2].tricontourf(triang_total, np.abs(num_T - num_Tp), 100, cmap='hot', vmin=0, vmax=0.5)
+ax[2].axis('off')
+ax[2].set_title('absolute error')
+
+plt.savefig('simple_poisson.png', dpi=300, bbox_inches='tight')
diff --git a/idrlnet/__init__.py b/idrlnet/__init__.py
new file mode 100644
index 0000000..593ccb4
--- /dev/null
+++ b/idrlnet/__init__.py
@@ -0,0 +1,15 @@
+import torch
+# todo more careful check
+GPU_ENABLED = True
+if torch.cuda.is_available():
+ try:
+ _ = torch.Tensor([0., 0.]).cuda()
+ torch.set_default_tensor_type('torch.cuda.FloatTensor')
+ print('gpu available')
+ GPU_ENABLED = True
+ except:
+ print('gpu not available')
+ GPU_ENABLED = False
+else:
+ print('gpu not available')
+ GPU_ENABLED = False
diff --git a/idrlnet/architecture/__init__.py b/idrlnet/architecture/__init__.py
new file mode 100644
index 0000000..a49ad7e
--- /dev/null
+++ b/idrlnet/architecture/__init__.py
@@ -0,0 +1,2 @@
+from .layer import *
+from .mlp import *
diff --git a/idrlnet/architecture/grid.py b/idrlnet/architecture/grid.py
new file mode 100644
index 0000000..a6a1264
--- /dev/null
+++ b/idrlnet/architecture/grid.py
@@ -0,0 +1,151 @@
+""" The module is experimental. It may be removed or totally refactored in the future."""
+
+import idrlnet.architecture.mlp as mlp
+import itertools
+import torch
+from typing import List, Tuple, Union, Dict
+from idrlnet.geo_utils.geo_obj import Rectangle
+from idrlnet.net import NetNode
+from idrlnet.pde_op.operator import Difference
+from idrlnet.data import get_data_node
+
+
+def indicator(xn: torch.Tensor, *axis_bounds):
+ # todo: use `heavyside`
+ i = 0
+ lb, ub, lb_eq = axis_bounds[0]
+ if lb_eq:
+ indic = torch.logical_and(xn[:, i:i + 1] >= axis_bounds[0][0], axis_bounds[0][1] >= xn[:, i:i + 1])
+ else:
+ indic = torch.logical_and(xn[:, i:i + 1] > axis_bounds[0][0], axis_bounds[0][1] >= xn[:, i:i + 1])
+ for i, (lb, ub, lb_eq) in enumerate(axis_bounds[1:]):
+ if lb_eq:
+ indic = torch.logical_and(indic, torch.logical_and(xn[:, i + 1:i + 2] >= lb, ub >= xn[:, i + 1:i + 2]))
+ else:
+ indic = torch.logical_and(indic, torch.logical_and(xn[:, i + 1:i + 2] > lb, ub >= xn[:, i + 1:i + 2]))
+ return indic
+
+
+class NetEval(torch.nn.Module):
+ def __init__(self, n_inputs: int, n_outputs: int, columns, rows, **kwargs):
+ super().__init__()
+ self.columns = columns
+ self.rows = rows
+ self.n_columns = len(self.columns) - 1
+ self.n_rows = len(self.rows) - 1
+ self.nets = []
+ if 'net_generator' in kwargs.keys():
+ net_gen = kwargs.pop('net_generator')
+ else:
+ net_gen = lambda: mlp.MLP([n_inputs, 20, 20, 20, 20, n_outputs])
+ for i in range(self.n_columns):
+ self.nets.append([])
+ for i in range(self.n_columns):
+ for j in range(self.n_rows):
+ self.nets[i].append(net_gen())
+ self.layers = torch.nn.ModuleList(itertools.chain(*self.nets))
+
+ def forward(self, x):
+ xn = x.detach()
+ y = 0
+ for i in range(self.n_columns):
+ for j in range(self.n_rows):
+ y += indicator(xn, (self.columns[i], self.columns[i + 1], True if i == 0 else False),
+ (self.rows[j], self.rows[j + 1], True if j == 0 else False)) * self.nets[i][j](x)
+ return y
+
+
+class Interface:
+ def __init__(self, points1, points2, nr, outputs, i1, j1, i2, j2, overlap=0.2):
+ x_min, x_max = min(points1[0], points2[0]), max(points1[0], points2[0])
+ y_min, y_max = min(points1[1], points2[1]), max(points1[1], points2[1])
+ self.geo = Rectangle((x_min - overlap / 2, y_min - overlap / 2), (x_max + overlap / 2, y_max + overlap / 2))
+ self.nr = nr
+ self.outputs = outputs
+ self.i1 = i1
+ self.j1 = j1
+ self.i2 = i2
+ self.j2 = j2
+
+ def __call__(self, *args, **kwargs):
+ points = self.geo.sample_boundary(self.nr)
+ return points, {f'difference_{output}_{self.i1}_{self.j1}_{output}_{self.i2}_{self.j2}': 0
+ for output in self.outputs}
+
+
+class NetGridNode(NetNode):
+ def __init__(self, inputs: Union[Tuple, List[str]], outputs: Union[Tuple, List[str]],
+ x_segments: List[float] = None, y_segments: List[float] = None,
+ z_segments: List[float] = None, t_segments: List[float] = None, columns: List[float] = None,
+ rows: List[float] = None, *args,
+ **kwargs):
+ if columns is None:
+ columns = []
+ if rows is None:
+ rows = []
+ require_no_grad = False
+ fixed = False
+ self.columns = columns
+ self.rows = rows
+ self.main_net = NetEval(n_inputs=len(inputs), n_outputs=len(outputs), columns=columns, rows=rows, **kwargs)
+ super(NetGridNode, self).__init__(inputs, outputs, self.main_net, fixed, require_no_grad, *args, **kwargs)
+
+ def get_grid(self, overlap, nr_points_per_interface_area=100):
+ n_columns = self.main_net.n_columns
+ n_rows = self.main_net.n_rows
+ netnodes = []
+ eqs = []
+ constraints = []
+ for i in range(n_columns):
+ for j in range(n_rows):
+ nn = NetNode(inputs=self.inputs,
+ outputs=tuple(f'{output}_{i}_{j}' for output in self.outputs),
+ net=self.main_net.nets[i][j],
+ name=f'{self.name}[{i}][{j}]')
+ nn.is_reference = True
+ netnodes.append(nn)
+ if i > 0:
+ for output in self.outputs:
+ diff_Node = Difference(f'{output}_{i - 1}_{j}', f'{output}_{i}_{j}', dim=2, time=False)
+ eqs.append(diff_Node)
+
+ interface = Interface((self.columns[i], self.rows[j]), (self.columns[i], self.rows[j + 1]),
+ nr_points_per_interface_area, self.outputs, i - 1, j, i, j, overlap=overlap)
+
+ constraints.append(get_data_node(interface, name=f'interface[{i - 1}][{j}]_[{i}][{j}]'))
+ if j > 0:
+ for output in self.outputs:
+ diff_Node = Difference(f'{output}_{i}_{j - 1}', f'{output}_{i}_{j}', dim=2, time=False)
+ eqs.append(diff_Node)
+
+ interface = Interface((self.columns[i], self.rows[j]), (self.columns[i + 1], self.rows[j]),
+ nr_points_per_interface_area, self.outputs, i, j - 1, i, j, overlap=overlap)
+
+ constraints.append(get_data_node(interface, name=f'interface[{i}][{j - 1}]_[{i}][{j}]'))
+ return netnodes, eqs, constraints
+
+
+def get_net_reg_grid_2d(inputs: Union[Tuple, List[str]], outputs: Union[Tuple, List[str]], name: str,
+ columns: List[float], rows: List[float], **kwargs):
+ if 'overlap' in kwargs.keys():
+ overlap = kwargs.pop('overlap')
+ else:
+ overlap = 0.2
+ net = NetGridNode(inputs=inputs, outputs=outputs, columns=columns, rows=rows, name=name, **kwargs)
+ nets, eqs, interfaces = net.get_grid(nr_points_per_interface_area=1000, overlap=overlap)
+ nets.append(net)
+ return nets, eqs, interfaces
+
+
+def get_net_reg_grid(inputs: Union[Tuple, List[str]], outputs: Union[Tuple, List[str]], name: str,
+ x_segments: List[float] = None, y_segments: List[float] = None, z_segments: List[float] = None,
+ t_segments: List[float] = None, **kwargs):
+ if 'overlap' in kwargs.keys():
+ overlap = kwargs.pop('overlap')
+ else:
+ overlap = 0.2
+ net = NetGridNode(inputs=inputs, outputs=outputs, x_segments=x_segments, y_segments=y_segments,
+ z_segments=z_segments, t_segments=t_segments, name=name, **kwargs)
+ nets, eqs, interfaces = net.get_grid(nr_points_per_interface_area=1000, overlap=overlap)
+ nets.append(net)
+ return nets, eqs, interfaces
diff --git a/idrlnet/architecture/layer.py b/idrlnet/architecture/layer.py
new file mode 100644
index 0000000..742f4a6
--- /dev/null
+++ b/idrlnet/architecture/layer.py
@@ -0,0 +1,149 @@
+""" The module provide elements for construct MLP."""
+
+import enum
+import math
+import torch
+from idrlnet.header import logger
+
+__all__ = ['Activation', 'Initializer', 'get_activation_layer', 'get_linear_layer']
+
+
+class Activation(enum.Enum):
+ relu = 'relu'
+ silu = 'silu'
+ selu = 'selu'
+ sigmoid = 'sigmoid'
+ tanh = 'tanh'
+ swish = 'swish'
+ poly = 'poly'
+ sin = 'sin'
+ leaky_relu = 'leaky_relu'
+
+
+class Initializer(enum.Enum):
+ Xavier_uniform = 'Xavier_uniform'
+ constant = 'constant'
+ kaiming_uniform = 'kaiming_uniform'
+ default = 'default'
+
+
+def get_linear_layer(input_dim: int, output_dim: int, weight_norm=False,
+ initializer: Initializer = Initializer.Xavier_uniform, *args,
+ **kwargs):
+ layer = torch.nn.Linear(input_dim, output_dim)
+ init_method = InitializerFactory.get_initializer(initializer=initializer, **kwargs)
+ init_method(layer.weight)
+ torch.nn.init.constant_(layer.bias, 0.)
+ if weight_norm:
+ layer = torch.nn.utils.weight_norm(layer)
+ return layer
+
+
+def get_activation_layer(activation: Activation = Activation.swish, *args, **kwargs):
+ return ActivationFactory.get_from_string(activation)
+
+
+def modularize(fun_generator):
+ def wrapper(fun):
+ class _LambdaModule(torch.nn.Module):
+ def __init__(self):
+ super().__init__()
+ self.fun = fun_generator(fun)
+
+ def forward(self, x):
+ # x = self.fun(-x)
+ x = self.fun(x)
+ return x
+
+ return type(fun.name, (_LambdaModule,), {})()
+
+ return wrapper
+
+
+class ActivationFactory:
+ @staticmethod
+ @modularize
+ def get_from_string(activation: Activation, *args, **kwargs):
+ if activation == Activation.relu:
+ return torch.relu
+ elif activation == Activation.selu:
+ return torch.selu
+ elif activation == Activation.sigmoid:
+ return torch.sigmoid
+ elif activation == Activation.tanh:
+ return torch.tanh
+ elif activation == Activation.swish:
+ return swish
+ elif activation == Activation.poly:
+ return poly
+ elif activation == Activation.sin:
+ return torch.sin
+ elif activation == Activation.silu:
+ return Silu()
+ else:
+ logger.error(f'Activation {activation} is not supported!')
+ raise NotImplementedError('Activation ' + activation.name + ' is not supported')
+
+
+class Silu:
+ def __init__(self):
+ try:
+ self.m = torch.nn.SiLU()
+ except:
+ self.m = lambda x: x * torch.sigmoid(x)
+
+ def __call__(self, x):
+ return self.m(x)
+
+
+def leaky_relu(x, leak=0.1):
+ f1 = 0.5 * (1 + leak)
+ f2 = 0.5 * (1 - leak)
+ return f1 * x + f2 * abs(x)
+
+
+def triangle_wave(x):
+ y = 0.0
+ for i in range(3):
+ y += (-1.0) ** (i) * torch.sin(2.0 * math.pi * (2.0 * i + 1.0) * x) / (2.0 * i + 1.0) ** (2)
+ y = 0.5 * (8 / (math.pi ** 2) * y) + .5
+ return y
+
+
+def swish(x):
+ return x * torch.sigmoid(x)
+
+
+def hard_swish(x):
+ return x * torch.sigmoid(100.0 * x)
+
+
+def poly(x):
+ axis = len(x.get_shape()) - 1
+ return torch.cat([x ** 3, x ** 2, x], axis)
+
+
+def fourier(x, terms=10):
+ axis = len(x.get_shape()) - 1
+ x_list = []
+ for i in range(terms):
+ x_list.append(torch.sin(2 * math.pi * i * x))
+ x_list.append(torch.cos(2 * math.pi * i * x))
+ return torch.cat(x_list, axis)
+
+
+class InitializerFactory:
+ @staticmethod
+ def get_initializer(initializer: Initializer, *args, **kwargs):
+ # todo: more
+ if initializer == Initializer.Xavier_uniform:
+ return torch.nn.init.xavier_uniform_
+ elif initializer == Initializer.constant:
+ return lambda x: torch.nn.init.constant_(x, kwargs['constant'])
+ elif initializer == Initializer.kaiming_uniform:
+ return lambda x: torch.nn.init.kaiming_uniform_(x, mode='fan_in', nonlinearity='relu')
+ elif initializer == Initializer.default:
+ return lambda x: x
+ else:
+ logger.error('initialization ' + initializer.name + ' is not supported')
+ raise NotImplementedError('initialization ' + initializer.name + ' is not supported')
diff --git a/idrlnet/architecture/mlp.py b/idrlnet/architecture/mlp.py
new file mode 100644
index 0000000..977221e
--- /dev/null
+++ b/idrlnet/architecture/mlp.py
@@ -0,0 +1,242 @@
+"""This module provide some MLP architectures."""
+
+import torch
+import math
+from collections import OrderedDict
+from idrlnet.architecture.layer import get_linear_layer, get_activation_layer, Initializer, Activation
+from typing import List, Union, Tuple
+from idrlnet.header import logger
+from idrlnet.net import NetNode
+import enum
+
+
+class MLP(torch.nn.Module):
+ """A subclass of torch.nn.Module customizes a multiple linear perceptron network.
+
+ :param n_seq: Define neuron numbers in each layer. The number of the first and the last should be in
+ keeping with inputs and outputs.
+ :type n_seq: List[int]
+ :param activation: By default, the activation is `Activation.swish`.
+ :type activation: Union[Activation,List[Activation]]
+ :param initialization:
+ :type initialization:Initializer
+ :param weight_norm: If weight normalization is used.
+ :type weight_norm: bool
+ :param name: Symbols will appear in the name of each layer. Do not confuse with the netnode name.
+ :type name: str
+ :param args:
+ :param kwargs:
+ """
+
+ def __init__(self, n_seq: List[int], activation: Union[Activation, List[Activation]] = Activation.swish,
+ initialization: Initializer = Initializer.kaiming_uniform,
+ weight_norm: bool = True, name: str = 'mlp', *args, **kwargs):
+ super().__init__()
+ self.layers = OrderedDict()
+ current_activation = ''
+ assert isinstance(n_seq, Activation) or isinstance(n_seq, list)
+ for i in range(len(n_seq) - 1):
+ if isinstance(activation, list):
+ current_activation = activation[i]
+ elif i < len(n_seq) - 2:
+ current_activation = activation
+ self.layers['{}_{}'.format(name, i)] = get_linear_layer(n_seq[i], n_seq[i + 1], weight_norm, initialization,
+ *args, **kwargs)
+ if (isinstance(activation, Activation) and i < len(n_seq) - 2) or isinstance(activation, list):
+ if current_activation == 'none':
+ continue
+ self.layers['{}_{}_activation'.format(name, i)] = get_activation_layer(current_activation, *args,
+ **kwargs)
+ self.layers = torch.nn.ModuleDict(self.layers)
+
+ def forward(self, x):
+ n_layers = len(self.layers)
+ i = 0
+ for name, layer in self.layers.items():
+ x = layer(x)
+ if i == n_layers - 1:
+ break
+ i += 1
+ return x
+
+
+class Siren(torch.nn.Module):
+ def __init__(self, n_seq: List[int], first_omega: float = 30.0,
+ omega: float = 30.0, name: str = 'siren', *args, **kwargs):
+ super().__init__()
+ self.layers = OrderedDict()
+ self.first_omega = first_omega
+ self.omega = omega
+ assert isinstance(n_seq, str) or isinstance(n_seq, list)
+ for i in range(len(n_seq) - 1):
+ if i == 0:
+ self.layers['{}_{}'.format(name, i)] = self.get_siren_layer(n_seq[i], n_seq[i + 1], True, first_omega)
+ else:
+ self.layers['{}_{}'.format(name, i)] = self.get_siren_layer(n_seq[i], n_seq[i + 1], False, omega)
+ if i < (len(n_seq) - 2):
+ self.layers['{}_{}_activation'.format(name, i)] = get_activation_layer(Activation.sin, *args, **kwargs)
+
+ self.layers = torch.nn.ModuleDict(self.layers)
+
+ @staticmethod
+ def get_siren_layer(input_dim: int, output_dim: int, is_first: bool, omega_0: float):
+ layer = torch.nn.Linear(input_dim, output_dim)
+ dim = input_dim
+ if is_first:
+ torch.nn.init.uniform_(layer.weight.data, -1.0 / dim, 1.0 / dim)
+ else:
+ torch.nn.init.uniform_(layer.weight.data, -1.0 * math.sqrt(6.0 / dim) / omega_0,
+ math.sqrt(6.0 / dim) / omega_0)
+ torch.nn.init.uniform_(layer.bias.data, -1 * math.sqrt(1 / dim), math.sqrt(1 / dim))
+ return layer
+
+ def forward(self, x):
+ i = 0
+ n_layers = len(self.layers)
+ for name, layer in self.layers.items():
+ x = layer(x)
+ if isinstance(layer, torch.nn.Linear) and i < n_layers - 1:
+ x = self.first_omega * x if i == 0 else self.omega * x
+ i += 1
+ return x
+
+
+class SingleVar(torch.nn.Module):
+ """Wrapper a single parameter to represent an unknown coefficient in inverse problem.
+
+ :param initialization: initialization value for the parameter. The default is 0.01
+ :type initialization: float
+ """
+
+ def __init__(self, initialization: float = 1.0):
+ super().__init__()
+ self.value = torch.nn.Parameter(torch.Tensor([initialization]))
+
+ def forward(self, x) -> torch.Tensor:
+ return x[:, :1] * 0. + self.value
+
+ def get_value(self) -> torch.Tensor:
+ return self.value
+
+
+class BoundedSingleVar(torch.nn.Module):
+ """Wrapper a single parameter to represent an unknown coefficient in inverse problem with the upper and lower bound.
+
+ :param lower_bound: The lower bound for the parameter.
+ :type lower_bound: float
+ :param upper_bound: The upper bound for the parameter.
+ :type upper_bound: float
+ """
+
+ def __init__(self, lower_bound, upper_bound):
+ super().__init__()
+ self.value = torch.nn.Parameter(torch.Tensor([0.0]))
+ self.layer = torch.nn.Sigmoid()
+ self.ub, self.lb = upper_bound, lower_bound
+
+ def forward(self, x) -> torch.Tensor:
+ return x[:, :1] * 0. + self.layer(self.value) * (self.ub - self.lb) + self.lb
+
+ def get_value(self) -> torch.Tensor:
+ return self.layer(self.value) * (self.ub - self.lb) + self.lb
+
+
+class Arch(enum.Enum):
+ """Enumerate pre-defined neural networks."""
+
+ mlp = 'mlp'
+ toy = 'toy'
+ mlp_xl = 'mlp_xl'
+ single_var = 'single_var'
+ bounded_single_var = 'bounded_single_var'
+ siren = 'siren'
+
+
+def get_net_node(inputs: Union[Tuple[str, ...], List[str]], outputs: Union[Tuple[str, ...], List[str]],
+ arch: Arch = None, name=None,
+ *args,
+ **kwargs) -> NetNode:
+ """Get a net node wrapping networks with pre-defined configurations
+
+ :param inputs: Input symbols for the generated node.
+ :type inputs: Union[Tuple[str, ...]
+ :param outputs: Output symbols for the generated node.
+ :type outputs: Union[Tuple[str, ...]
+ :param arch: One can choose one of
+ - Arch.mlp
+ - Arch.mlp_xl(more layers and more neurons)
+ - Arch.single_var
+ - Arch.bounded_single_var
+ :type arch: Arch
+ :param name: The name of the generated node.
+ :type name: str
+ :param args:
+ :param kwargs:
+ :return:
+ """
+ arch = Arch.mlp if arch is None else arch
+ if 'evaluate' in kwargs.keys():
+ evaluate = kwargs.pop('evaluate')
+ else:
+ if arch == Arch.mlp:
+ seq = kwargs['seq'] if 'seq' in kwargs.keys() else [len(inputs), 20, 20, 20, 20, len(outputs)]
+ evaluate = MLP(n_seq=seq, activation=Activation.swish, initialization=Initializer.kaiming_uniform,
+ weight_norm=True)
+ elif arch == Arch.toy:
+ evaluate = SimpleExpr("nothing")
+ elif arch == Arch.mlp_xl or arch == 'fc':
+ seq = kwargs['seq'] if 'seq' in kwargs.keys() else [len(inputs), 512, 512, 512, 512, 512, 512, len(outputs)]
+ evaluate = MLP(n_seq=seq, activation=Activation.silu, initialization=Initializer.kaiming_uniform,
+ weight_norm=True)
+ elif arch == Arch.single_var:
+ evaluate = SingleVar(initialization=kwargs.get('initialization', 1.))
+ elif arch == Arch.bounded_single_var:
+ evaluate = BoundedSingleVar(lower_bound=kwargs['lower_bound'], upper_bound=kwargs['upper_bound'])
+ elif arch == Arch.siren:
+ seq = kwargs['seq'] if 'seq' in kwargs.keys() else [len(inputs), 512, 512, 512, 512, 512, 512, len(outputs)]
+ evaluate = Siren(n_seq=seq)
+ else:
+ logger.error(f'{arch} is not supported!')
+ raise NotImplementedError(f'{arch} is not supported!')
+ nn = NetNode(inputs=inputs, outputs=outputs, net=evaluate, name=name, *args, **kwargs)
+ return nn
+
+
+def get_shared_net_node(shared_node: NetNode, inputs: Union[Tuple[str, ...], List[str]],
+ outputs: Union[Tuple[str, ...], List[str]], name=None, *args,
+ **kwargs) -> NetNode:
+ """Construct a netnode, the net of which is shared by a given netnode. One can specify different inputs and outputs
+ just like an independent netnode. However, the net parameters may have multiple references. Thus the step
+ operations during optimization should only be applied once.
+
+ :param shared_node: An existing netnode, the network of which will be shared.
+ :type shared_node: NetNode
+ :param inputs: Input symbols for the generated node.
+ :type inputs: Union[Tuple[str, ...]
+ :param outputs: Output symbols for the generated node.
+ :type outputs: Union[Tuple[str, ...]
+ :param name: The name of the generated node.
+ :type name: str
+ :param args:
+ :param kwargs:
+ :return:
+ """
+ nn = NetNode(inputs, outputs, shared_node.net, is_reference=True, name=name, *args, **kwargs)
+ return nn
+
+
+def get_inter_name(length: int, prefix: str):
+ return [prefix + f'_{i}' for i in range(length)]
+
+
+class SimpleExpr(torch.nn.Module):
+ """This class is for testing. One can override SimpleExper.forward to represent complex formulas."""
+
+ def __init__(self, expr, name='expr'):
+ super().__init__()
+ self.evaluate = expr
+ self.name = name
+ self._placeholder = torch.nn.Parameter(torch.Tensor([0.0]))
+
+ def forward(self, x):
+ return self._placeholder + x[:, :1] * x[:, :1] / 2 + x[:, 1:] * x[:, 1:] / 2 - self._placeholder
diff --git a/idrlnet/callbacks.py b/idrlnet/callbacks.py
new file mode 100644
index 0000000..e3d21f4
--- /dev/null
+++ b/idrlnet/callbacks.py
@@ -0,0 +1,71 @@
+"""Basic Callback classes"""
+
+import os
+import pathlib
+from typing import Dict
+from torch.utils.tensorboard import SummaryWriter
+from idrlnet.receivers import Receiver, Signal
+from idrlnet.variable import Variables
+
+__all__ = ['GradientReceiver', 'SummaryReceiver', 'HandleResultReceiver']
+
+
+class GradientReceiver(Receiver):
+ """Register the receiver to monitor gradient norm on the Tensorboard."""
+
+ def receive_notify(self, solver: 'Solver', message):
+ if not (Signal.TRAIN_PIPE_END in message):
+ return
+ for netnode in solver.netnodes:
+ if not netnode.require_no_grad:
+ model = netnode.net
+ total_norm = 0
+ for p in model.parameters():
+ param_norm = p.grad.data.norm(2)
+ total_norm += param_norm.item() ** 2
+ total_norm = total_norm ** (1. / 2)
+ assert isinstance(solver.receivers[0], SummaryWriter)
+ solver.summary_receiver.add_scalar('gradient/total_norm', total_norm, solver.global_step)
+
+
+class SummaryReceiver(SummaryWriter, Receiver):
+ """The receiver will be automatically registered to control the Tensorboard."""
+
+ def __init__(self, *args, **kwargs):
+ SummaryWriter.__init__(self, *args, **kwargs)
+
+ def receive_notify(self, solver: 'Solver', message: Dict):
+ if Signal.AFTER_COMPUTE_LOSS in message.keys():
+ loss_component = message[Signal.AFTER_COMPUTE_LOSS]
+ self.add_scalars('loss_overview', loss_component, solver.global_step)
+ for key, value in loss_component.items():
+ self.add_scalar(f'loss_component/{key}', value, solver.global_step)
+ if Signal.TRAIN_PIPE_END in message.keys():
+ for i, optimizer in enumerate(solver.optimizers):
+ self.add_scalar(f'optimizer/lr_{i}', optimizer.param_groups[0]['lr'], solver.global_step)
+
+
+class HandleResultReceiver(Receiver):
+ """The receiver will be automatically registered to save results on training domains."""
+
+ def __init__(self, result_dir):
+ self.result_dir = result_dir
+
+ def receive_notify(self, solver: 'Solver', message: Dict):
+ if Signal.SOLVE_END in message.keys():
+ samples = solver.sample_variables_from_domains()
+ in_var, _, lambda_out = solver.generate_in_out_dict(samples)
+ pred_out_sample = solver.forward_through_all_graph(in_var, solver.outvar_dict_index)
+ diff_out_sample = {key: Variables() for key in pred_out_sample}
+ results_path = pathlib.Path(self.result_dir)
+ results_path.mkdir(exist_ok=True, parents=True)
+ for key in samples:
+ for _key in samples[key]:
+ if _key not in pred_out_sample[key].keys():
+ pred_out_sample[key][_key] = samples[key][_key]
+ diff_out_sample[key][_key] = samples[key][_key]
+ else:
+ diff_out_sample[key][_key] = pred_out_sample[key][_key] - samples[key][_key]
+ samples[key].save(os.path.join(results_path, f'{key}_true'), ['vtu', 'np', 'csv'])
+ pred_out_sample[key].save(os.path.join(results_path, f'{key}_pred'), ['vtu', 'np', 'csv'])
+ diff_out_sample[key].save(os.path.join(results_path, f'{key}_diff'), ['vtu', 'np', 'csv'])
diff --git a/idrlnet/data.py b/idrlnet/data.py
new file mode 100644
index 0000000..b00910d
--- /dev/null
+++ b/idrlnet/data.py
@@ -0,0 +1,182 @@
+"""Define DataNode"""
+
+import numpy
+import torch
+import inspect
+import functools
+import abc
+from typing import Callable, Tuple, List, Union
+from idrlnet.variable import Variables
+from idrlnet.node import Node
+from idrlnet.geo_utils.sympy_np import lambdify_np
+from idrlnet.header import logger
+
+
+class DataNode(Node):
+ """A class inherits node.Node. With sampling methods implemented, the instance will generate sample points.
+
+ :param inputs: input keys in return.
+ :type inputs: Union[Tuple[str, ...], List[str]]
+ :param outputs: output keys in return.
+ :type outputs: Union[Tuple[str, ...], List[str]]
+ :param sample_fn: Callable instances for sampling. Implementation of SampleDomain is suggested for this arg.
+ :type sample_fn: Callable
+ :param loss_fn: Reduce the difference between a given data and this the output of the node to a simple scalar.
+ square and L1 are implemented currently.
+ defaults to 'square'.
+ :type loss_fn: str
+ :param lambda_outputs: Weight for each output in return, defaults to None.
+ :type lambda_outputs: Union[Tuple[str,...], List[str]]
+ :param name: The name of the node.
+ :type name: str
+ :param sigma: The weight for the whole node. defaults to 1.
+ :type sigma: float
+ :param var_sigma: whether automatical loss balance technique is used. defaults to false
+ :type var_sigma: bool
+ :param args:
+ :param kwargs:
+ """
+ counter = 0
+
+ @property
+ def sample_fn(self):
+ return self._sample_fn
+
+ @sample_fn.setter
+ def sample_fn(self, sample_fn):
+ self._sample_fn = sample_fn
+
+ @property
+ def loss_fn(self):
+ return self._loss_function
+
+ @loss_fn.setter
+ def loss_fn(self, loss_fn):
+ self._loss_function = loss_fn
+
+ @property
+ def lambda_outputs(self):
+ return self._lambda_outputs
+
+ @lambda_outputs.setter
+ def lambda_outputs(self, lambda_outputs):
+ self._lambda_outputs = lambda_outputs
+
+ @property
+ def sigma(self):
+ """A weight for the domain."""
+ return self._sigma
+
+ @sigma.setter
+ def sigma(self, sigma):
+ self._sigma = sigma
+
+ def sample(self) -> Variables:
+ """Sample a group of points, represented by Variables.
+
+ :return: a group of points.
+ :rtype: Variables
+ """
+ input_vars, output_vars = self.sample_fn()
+ for key, value in output_vars.items():
+ if isinstance(value, torch.Tensor):
+ pass
+ elif isinstance(value, numpy.ndarray):
+ pass
+ else:
+ try:
+ output_vars[key] = lambdify_np(value, input_vars)(**input_vars)
+ except:
+ logger.error('unsupported constraints type.')
+ raise ValueError('unsupported constraints type.')
+
+ try:
+ return Variables({**input_vars, **output_vars}).to_torch_tensor_()
+ except:
+ return Variables({**input_vars, **output_vars})
+
+ def __init__(self, inputs: Union[Tuple[str, ...], List[str]], outputs: Union[Tuple[str, ...], List[str]],
+ sample_fn: Callable, loss_fn: str = 'square', lambda_outputs: Union[Tuple[str, ...], List[str]] = None,
+ name=None, sigma=1.0, var_sigma=False,
+ *args, **kwargs):
+ self.inputs: Union[Tuple, List[str]] = inputs
+ self.outputs: Union[Tuple, List[str]] = outputs
+ self.lambda_outputs = lambda_outputs
+ if name is not None:
+ self.name = name
+ else:
+ self.name: str = "Domain_{}".format(self.counter)
+ type(self).counter += 1
+ self.sigma = sigma
+ self.sigma = torch.tensor(sigma, dtype=torch.float32, requires_grad=var_sigma)
+ self.sample_fn: Callable = sample_fn
+ self.loss_fn = loss_fn
+
+ def __str__(self):
+ str_list = ["DataNode properties:\n"
+ "lambda_outputs: {}\n".format(self.lambda_outputs)]
+ return super().__str__() + ''.join(str_list)
+
+
+def get_data_node(fun: Callable, name=None, loss_fn='square', sigma=1., var_sigma=False, *args, **kwargs) -> DataNode:
+ """ Construct a datanode from sampling functions.
+
+ :param fun: Each call of the Callable object should return a sampling dict.
+ :type fun: Callable
+ :param name: name of the generated Datanode, defaults to None
+ :type name: str
+ :param loss_fn: Specify a loss function for the data node.
+ :type loss_fn: str
+ :param args:
+ :param kwargs:
+ :return: An instance of Datanode
+ :rtype: DataNode
+ """
+ in_, out_ = fun()
+ inputs = list(in_.keys())
+ outputs = list(out_.keys())
+ lambda_outputs = list(filter(lambda x: x.startswith('lambda_'), outputs))
+ outputs = list(filter(lambda x: not x.startswith('lambda_'), outputs))
+ name = (fun.__name__ if inspect.isfunction(fun) else type(fun).__name__) if name is None else name
+ dn = DataNode(inputs=inputs, outputs=outputs, sample_fn=fun, lambda_outputs=lambda_outputs, loss_fn=loss_fn,
+ name=name, sigma=sigma, var_sigma=var_sigma, *args, **kwargs)
+ return dn
+
+
+def datanode(_fun: Callable = None, name=None, loss_fn='square', sigma=1., var_sigma=False, **kwargs):
+ """As an alternative, decorate Callable classes as Datanode."""
+
+ def wrap(fun):
+ if inspect.isclass(fun):
+ assert issubclass(fun, SampleDomain), f"{fun} should be subclass of .data.Sample"
+ fun = fun()
+ assert isinstance(fun, Callable)
+
+ @functools.wraps(fun)
+ def wrapped_fun():
+ dn = get_data_node(fun, name=name, loss_fn=loss_fn, sigma=sigma, var_sigma=var_sigma, **kwargs)
+ return dn
+
+ return wrapped_fun
+
+ return wrap if _fun is None else wrap(_fun)
+
+
+def get_data_nodes(funs: List[Callable], *args, **kwargs) -> Tuple[DataNode]:
+ if 'names' in kwargs:
+ names = kwargs.pop('names')
+ return tuple(get_data_node(fun, name=name, *args, **kwargs) for fun, name in zip(funs, names))
+ else:
+ return tuple(get_data_node(fun, *args, **kwargs) for fun in funs)
+
+
+class SampleDomain(metaclass=abc.ABCMeta):
+ """Template for Callable sampling function."""
+
+ @abc.abstractmethod
+ def sampling(self, *args, **kwargs):
+ """The method returns sampling points"""
+ raise NotImplementedError(f"{type(self)}.sampling method not implemented")
+
+ def __call__(self, *args, **kwargs):
+ return self.sampling(self, *args, **kwargs)
diff --git a/idrlnet/geo_utils/__init__.py b/idrlnet/geo_utils/__init__.py
new file mode 100644
index 0000000..c74967c
--- /dev/null
+++ b/idrlnet/geo_utils/__init__.py
@@ -0,0 +1,3 @@
+from .geo_builder import GeometryBuilder
+from .geo_obj import *
+from .sympy_np import *
diff --git a/idrlnet/geo_utils/geo.py b/idrlnet/geo_utils/geo.py
new file mode 100644
index 0000000..1022b40
--- /dev/null
+++ b/idrlnet/geo_utils/geo.py
@@ -0,0 +1,347 @@
+"""This module defines basic behaviour of Geometric Objects."""
+import abc
+import collections
+import copy
+import itertools
+from functools import reduce
+from typing import Dict, List, Union, Tuple
+import numpy as np
+from sympy import cos, sin, Symbol
+import math
+
+from idrlnet.geo_utils.sympy_np import lambdify_np, WrapMax, WrapMul, WrapMin
+
+
+class CheckMeta(type):
+ """Make sure that elements are checked when an instance is created,"""
+
+ def __call__(cls, *args, **kwargs):
+ obj = type.__call__(cls, *args, **kwargs)
+ obj.check_elements()
+ return obj
+
+
+class AbsGeoObj(metaclass=abc.ABCMeta):
+ @abc.abstractmethod
+ def rotation(self, angle: float, axis: str = 'z'):
+ pass
+
+ @abc.abstractmethod
+ def scaling(self, scale: float):
+ pass
+
+ @abc.abstractmethod
+ def translation(self, direction):
+ pass
+
+
+class Edge(AbsGeoObj):
+ def __init__(self, functions, ranges: Dict, area):
+ self.functions = functions
+ self.ranges = ranges
+ self.area = area
+
+ @property
+ def axes(self) -> List[str]:
+ return [key for key in self.functions if not key.startswith('normal')]
+
+ def rotation(self, angle: float, axis: str = 'z'):
+ assert len(self.axes) > 1, 'Cannot rotate a object with dim<2'
+ rotated_dims = [key for key in self.axes if key != axis]
+ rd1, rd2, n = rotated_dims[0], rotated_dims[1], 'normal_'
+ self.functions[rd1] = (cos(angle) * self.functions[rd1] - sin(angle) * self.functions[rd2])
+ self.functions[n + rd1] = cos(angle) * self.functions[n + rd1] - sin(angle) * self.functions[n + rd2]
+ self.functions[rd2] = (sin(angle) * self.functions[rd1] + cos(angle) * self.functions[rd2])
+ self.functions[n + rd2] = sin(angle) * self.functions[n + rd1] + cos(angle) * self.functions[n + rd2]
+ return self
+
+ def scaling(self, scale: float):
+ for key in self.axes:
+ self.functions[key] *= scale
+ self.area = scale ** (len(self.axes) - 1) * self.area
+ return self
+
+ def translation(self, direction):
+ assert len(direction) == len(self.axes), 'Moving direction must have the save dimension with the object'
+ for key, x in zip(self.axes, direction):
+ self.functions[key] += x
+ return self
+
+ def sample(self, density: int, param_ranges=None, low_discrepancy=False) -> Dict[str, np.ndarray]:
+ param_ranges = {} if param_ranges is None else param_ranges
+ inputs = {**self.ranges, **param_ranges}.keys()
+ area_fn = lambdify_np(self.area, inputs)
+ param_points = _ranged_sample(100, ranges={**self.ranges, **param_ranges})
+ nr_points = int(density * (np.mean(area_fn(**param_points))))
+
+ lambdify_functions = {'area': lambda **x: area_fn(**x) / next(iter(x.values())).shape[0]}
+ param_points = _ranged_sample(nr_points, {**self.ranges, **param_ranges}, low_discrepancy)
+ data_var = {}
+
+ for key, function in self.functions.items():
+ lambdify_functions[key] = lambdify_np(function, inputs)
+
+ for key, function in lambdify_functions.items():
+ assert callable(function)
+ data_var[key] = function(**param_points)
+
+ for key in param_ranges:
+ key = key if isinstance(key, str) else key.name
+ data_var[key] = param_points[key]
+
+ return data_var
+
+
+class AbsCheckMix(abc.ABCMeta, CheckMeta):
+ pass
+
+
+class Geometry(AbsGeoObj, metaclass=AbsCheckMix):
+ edges: List[Edge] = None
+ bounds: Dict = None
+ sdf = None
+
+ def check_elements(self):
+ if type(self) in [Geometry, Geometry1D, Geometry2D, Geometry3D]:
+ return
+ if self.edges is None:
+ raise NotImplementedError('Geometry must define edges')
+ if self.bounds is None:
+ raise NotImplementedError('Geometry must define bounds')
+ if self.sdf is None:
+ raise NotImplementedError('Geometry must define sdf')
+
+ @property
+ def axes(self) -> List[str]:
+ return self.edges[0].axes
+
+ def translation(self, direction: Union[List, Tuple]) -> 'Geometry':
+ assert len(direction) == len(self.axes)
+ [edge.translation(direction) for edge in self.edges]
+ self.sdf = self.sdf.subs([(Symbol(dim), Symbol(dim) - x) for dim, x in zip(self.axes, direction)])
+ self.bounds = {dim: (self.bounds[dim][0] + x, self.bounds[dim][1] + x) for dim, x in zip(self.axes, direction)}
+ return self
+
+ def rotation(self, angle: float, axis: str = 'z', center=None) -> 'Geometry':
+ if center is not None:
+ self.translation([-x for x in center])
+
+ [edge.rotation(angle, axis) for edge in self.edges]
+ rotated_dims = [key for key in self.axes if key != axis]
+ sp_0 = Symbol(rotated_dims[0])
+ _sp_0 = Symbol('tmp_0')
+ sp_1 = Symbol(rotated_dims[1])
+ _sp_1 = Symbol('tmp_1')
+ self.sdf = self.sdf.subs({sp_0: cos(angle) * _sp_0 + sin(angle) * _sp_1,
+ sp_1: - sin(angle) * _sp_0 + cos(angle) * _sp_1})
+ self.sdf = self.sdf.subs({_sp_0: sp_0, _sp_1: sp_1})
+ self.bounds[rotated_dims[0]], self.bounds[rotated_dims[1]] = _rotate_rec(self.bounds[rotated_dims[0]],
+ self.bounds[rotated_dims[1]],
+ angle=angle)
+ if center is not None:
+ self.translation(center)
+ return self
+
+ def scaling(self, scale: float, center: Tuple = None) -> 'Geometry':
+ assert scale > 0, 'scaling must be positive'
+ if center is not None:
+ self.translation(tuple([-x for x in center]))
+ [edge.scaling(scale) for edge in self.edges]
+ self.sdf = self.sdf.subs({Symbol(dim): Symbol(dim) / scale for dim in self.axes})
+ self.sdf = scale * self.sdf
+ for dim in self.axes:
+ self.bounds[dim] = (self.bounds[dim][0] * scale, self.bounds[dim][1] * scale)
+ if center is not None:
+ self.translation(center)
+ return self
+
+ def duplicate(self) -> 'Geometry':
+ return copy.deepcopy(self)
+
+ def sample_boundary(self, density: int, sieve=None, param_ranges: Dict = None, low_discrepancy=False) -> Dict[
+ str, np.ndarray]:
+ param_ranges = dict() if param_ranges is None else param_ranges
+ points_list = [edge.sample(density, param_ranges, low_discrepancy) for edge in
+ self.edges]
+ points = reduce(lambda e1, e2: {_k: np.concatenate([e1[_k], e2[_k]], axis=0) for _k in e1}, points_list)
+ points = self._sieve_points(points, sieve, sign=-1, tol=1e-4)
+ return points
+
+ def _sieve_points(self, points, sieve, tol=1e-4, sign=1.):
+
+ sdf_fn = lambdify_np(self.sdf, points.keys())
+ points['sdf'] = sdf_fn(**points)
+
+ criteria_fn = lambdify_np(True if sieve is None else sieve, points.keys())
+ criteria_index = np.logical_and(np.greater(points['sdf'], -tol), criteria_fn(**points))
+ if sign == -1:
+ criteria_index = np.logical_and(np.less(points['sdf'], tol), criteria_index)
+ points = {k: v[criteria_index[:, 0], :] for k, v in points.items()}
+ return points
+
+ def sample_interior(self, density: int, bounds: Dict = None, sieve=None, param_ranges: Dict = None,
+ low_discrepancy=False) -> Dict[str, np.ndarray]:
+ bounds = self.bounds if bounds is None else bounds
+ bounds = {Symbol(key) if isinstance(key, str) else key: value for key, value in bounds.items()}
+ param_ranges = {} if param_ranges is None else param_ranges
+ measure = np.prod([value[1] - value[0] for value in bounds.values()])
+ nr_points = int(measure * density)
+
+ points = _ranged_sample(nr_points, {**bounds, **param_ranges}, low_discrepancy=low_discrepancy)
+ assert len(points.keys()) >= 0, "No points have been sampled!"
+
+ points = self._sieve_points(points, sieve, tol=0.)
+
+ points['area'] = np.zeros_like(points['sdf']) + (1.0 / density)
+ return points
+
+ def __add__(self, other: 'Geometry') -> 'Geometry':
+ geo = self.generate_geo_obj(other)
+ geo.edges = self.edges + other.edges
+ geo.sdf = WrapMax(self.sdf, other.sdf)
+ geo.bounds = dict()
+ for key, value in self.bounds.items():
+ geo.bounds[key] = (
+ min(other.bounds[key][0], self.bounds[key][0]), max(other.bounds[key][1], self.bounds[key][1]))
+ return geo
+
+ def generate_geo_obj(self, other=None):
+ if isinstance(self, Geometry1D):
+ geo = Geometry1D()
+ assert isinstance(other, Geometry1D) or other is None
+ elif isinstance(self, Geometry2D):
+ geo = Geometry2D()
+ assert isinstance(other, Geometry2D) or other is None
+ elif isinstance(self, Geometry3D):
+ geo = Geometry3D()
+ assert isinstance(other, Geometry3D) or other is None
+ else:
+ raise TypeError
+ return geo
+
+ def __sub__(self, other: 'Geometry') -> 'Geometry':
+ geo = self.generate_geo_obj(other)
+
+ geo.edges = self.edges + [_inverse_edge(edge) for edge in other.edges]
+ geo.sdf = WrapMin(self.sdf, WrapMul(-1, other.sdf))
+ geo.bounds = dict()
+ for key, value in self.bounds.items():
+ geo.bounds[key] = (self.bounds[key][0], self.bounds[key][1])
+ return geo
+
+ def __invert__(self) -> 'Geometry':
+ geo = self.generate_geo_obj()
+ geo.edges = [_inverse_edge(edge) for edge in self.edges]
+ geo.sdf = WrapMul(-1, self.sdf)
+ for key, value in self.bounds.items():
+ geo.bounds[key] = (-float('inf'), float('inf'))
+ return geo
+
+ def __and__(self, other: 'Geometry') -> 'Geometry':
+ geo = self.generate_geo_obj(other)
+ geo.edges = self.edges + other.edges
+ geo.sdf = WrapMin(self.sdf, other.sdf)
+ geo.bounds = dict()
+ for key, value in self.bounds.items():
+ geo.bounds[key] = (
+ max(other.bounds[key][0], self.bounds[key][0]), min(other.bounds[key][1], self.bounds[key][1]))
+ return geo
+
+
+class Geometry1D(Geometry):
+ pass
+
+
+class Geometry2D(Geometry):
+ pass
+
+
+class Geometry3D(Geometry):
+ pass
+
+
+# todo: sample in cuda device
+def _ranged_sample(batch_size: int, ranges: Dict, low_discrepancy: bool = False) -> Dict[str, np.ndarray]:
+ points = dict()
+ low_discrepancy_stack = []
+ for key, value in ranges.items():
+ if isinstance(value, (float, int)):
+ samples = np.ones((batch_size, 1)) * value
+ elif isinstance(value, tuple):
+ assert len(value) == 2, 'Tuple: length of range should be 2!'
+ if low_discrepancy:
+ low_discrepancy_stack.append((key.name, value))
+ continue
+ else:
+ samples = np.random.uniform(value[0], value[1], size=(batch_size, 1))
+ elif isinstance(value, collections.Callable):
+ samples = value(batch_size)
+ else:
+ raise TypeError(f'range type {type(value)} not supported!')
+ points[key.name] = samples
+ if low_discrepancy:
+ low_discrepancy_points_dict = _low_discrepancy_sampling(batch_size, low_discrepancy_stack)
+ points.update(low_discrepancy_points_dict)
+ for key, v in points.items():
+ points[key] = v.astype(np.float64)
+ return points
+
+
+def _rotate_rec(x: Tuple, y: Tuple, angle: float):
+ points = itertools.product(x, y)
+ min_x, min_y = float('inf'), float('inf')
+ max_x, max_y = -float('inf'), -float('inf')
+ try:
+ for x, y in points:
+ new_x = cos(angle) * x - sin(angle) * y
+ new_y = sin(angle) * x + cos(angle) * y
+ min_x = min(new_x, min_x)
+ min_y = min(new_y, min_y)
+ max_x = max(new_x, max_x)
+ max_y = max(new_y, max_y)
+ except TypeError:
+ angle = math.pi / 4
+ for x, y in points:
+ new_x = cos(angle) * x - sin(angle) * y
+ new_y = sin(angle) * x + cos(angle) * y
+ min_x = min(new_x, min_x)
+ min_y = min(new_y, min_y)
+ max_x = max(new_x, max_x)
+ max_y = max(new_y, max_y)
+ return (min_x, max_x), (min_y, max_y)
+
+
+def _low_discrepancy_sampling(n_points, low_discrepancy_stack: List[Tuple]):
+ dim = len(low_discrepancy_stack)
+ sections = 2 ** dim
+
+ def uniform(x, start, end, rmin, bi_range=0.5):
+ dims = len(rmin)
+ if end - start <= 1:
+ return
+ d, r = (end - start) // sections, (end - start) % sections
+ r = (np.arange(sections - 1, 0, -1) + r) // sections
+ np.random.shuffle(r)
+ d = (d + r).cumsum() + start
+ q = np.concatenate([np.array([start]), d, np.array([end])])
+
+ for i in range(len(q) - 1):
+ for j in range(dims):
+ x[q[i]:q[i + 1], j] = (x[q[i]:q[i + 1], j] - rmin[j]) / 2 + rmin[j] + ((i >> j) & 1) * bi_range
+ rmin_sub = [v + bi_range * ((i >> j) & 1) for j, v in enumerate(rmin)]
+ uniform(x, q[i], q[i + 1], rmin_sub, bi_range=bi_range / 2)
+ return x
+
+ n = n_points
+ points = np.random.rand(n, dim)
+ uniform(points, start=0, end=n, rmin=[0] * dim)
+ points_dict = {}
+ for i, (key, bi_range) in enumerate(low_discrepancy_stack):
+ points_dict[key] = points[:, i:i + 1] * (bi_range[1] - bi_range[0]) + bi_range[0]
+ return points_dict
+
+
+def _inverse_edge(edge: Edge):
+ new_functions = {k: -v if k.startswith('normal_') else v for k, v in edge.functions.items()}
+ edge = Edge(functions=new_functions, ranges=edge.ranges, area=edge.area)
+ return edge
diff --git a/idrlnet/geo_utils/geo_builder.py b/idrlnet/geo_utils/geo_builder.py
new file mode 100644
index 0000000..5056616
--- /dev/null
+++ b/idrlnet/geo_utils/geo_builder.py
@@ -0,0 +1,37 @@
+""" A simple factory for constructing Geometric Objects"""
+
+from .geo import Geometry
+from .geo_obj import Line1D, Line, Tube2D, Rectangle, Circle, Plane, Tube3D, Box, Sphere, Cylinder, CircularTube, \
+ Triangle, Heart
+
+__all__ = ['GeometryBuilder']
+
+
+class GeometryBuilder:
+ GEOMAP = {'Line1D': Line1D,
+ 'Line': Line,
+ 'Rectangle': Rectangle,
+ 'Circle': Circle,
+ 'Channel2D': Tube2D,
+ 'Plane': Plane,
+ 'Sphere': Sphere,
+ 'Box': Box,
+ 'Channel': Tube3D,
+ 'Channel3D': Tube3D,
+ 'Cylinder': Cylinder,
+ 'CircularTube': CircularTube,
+ 'Triangle': Triangle,
+ 'Heart': Heart,
+ }
+
+ @staticmethod
+ def get_geometry(geo: str, **kwargs) -> Geometry:
+ """Simple factory method for constructing geometry object.
+ :param geo: Specified a string for geometry, which should be in GeometryBuilder.GEOMAP
+ :rtype geo: str
+ :param kwargs:
+ :return: A geometry object with given kwargs.
+ :rtype: Geometry
+ """
+ assert geo in GeometryBuilder.GEOMAP.keys(), f'The geometry {geo} not implemented!'
+ return GeometryBuilder.GEOMAP[geo](**kwargs)
diff --git a/idrlnet/geo_utils/geo_obj.py b/idrlnet/geo_utils/geo_obj.py
new file mode 100644
index 0000000..ef7e88b
--- /dev/null
+++ b/idrlnet/geo_utils/geo_obj.py
@@ -0,0 +1,549 @@
+"""Concrete shape."""
+
+import math
+from math import pi
+from typing import Union, List, Tuple
+import numpy as np
+from sympy import symbols, Abs, sqrt, Max, Min, cos, sin, log, sign, Heaviside
+from sympy.vector import CoordSys3D
+from .geo import Edge, Geometry1D, Geometry2D, Geometry3D
+
+__all__ = ['Line1D', 'Line', 'Tube2D', 'Rectangle', 'Circle', 'Heart', 'Triangle', 'Polygon', 'Plane', 'Tube3D', 'Tube',
+ 'CircularTube', 'Box', 'Sphere', 'Cylinder']
+
+
+class Line1D(Geometry1D):
+
+ def __init__(self, point_1, point_2):
+ x, none = symbols('x none')
+ ranges = {none: (0, 1)}
+ edge_1 = Edge(functions={'x': point_1,
+ 'normal_x': -1},
+ area=1.0,
+ ranges=ranges)
+ edge_2 = Edge(functions={'x': point_2,
+ 'normal_x': 1},
+ area=1.0,
+ ranges=ranges)
+ self.edges = [edge_1, edge_2]
+ dist = point_2 - point_1
+ center_x = point_1 + dist / 2
+ self.sdf = dist / 2 - Abs(x - center_x)
+
+ self.bounds = {'x': (point_1, point_2)}
+
+
+class Line(Geometry2D):
+ def __init__(self, point_1, point_2, normal=1):
+ x, y, l = symbols('x y l')
+ ranges = {l: (0, 1)}
+ dist_x = point_2[0] - point_1[0]
+ dist_y = point_2[1] - point_1[1]
+ normal_vector = (-dist_y * normal, dist_x * normal)
+ normal_norm = math.sqrt(normal_vector[0] ** 2 + normal_vector[1] ** 2)
+ normal_vector = (normal_vector[0] / normal_norm, normal_vector[1] / normal_norm)
+ line_1 = Edge(functions={'x': point_1[0] + l * dist_x,
+ 'y': point_1[1] + l * dist_y,
+ 'normal_x': normal_vector[0],
+ 'normal_y': normal_vector[1]},
+ ranges=ranges,
+ area=normal_norm)
+ self.edges = [line_1]
+ self.sdf = ((x - point_1[0]) * dist_y - (y - point_1[1]) * dist_x) / normal_norm
+ self.bounds = {'x': (min(point_1[0], point_2[0]), max(point_1[0], point_2[0])),
+ 'y': (min(point_1[1], point_2[1]), max(point_1[1], point_2[1]))}
+
+
+class Tube2D(Geometry2D):
+
+ def __init__(self, point_1, point_2):
+ l, y = symbols('l y')
+ ranges = {l: (0, 1)}
+ dist_x = point_2[0] - point_1[0]
+ dist_y = point_2[1] - point_1[1]
+ line_1 = Edge(functions={'x': l * dist_x + point_1[0],
+ 'y': point_1[1],
+ 'normal_x': 0,
+ 'normal_y': -1},
+ ranges=ranges,
+ area=dist_x)
+ line_2 = Edge(functions={'x': l * dist_x + point_1[0],
+ 'y': point_2[1],
+ 'normal_x': 0,
+ 'normal_y': 1},
+ ranges=ranges,
+ area=dist_x)
+ self.edges = [line_1, line_2]
+ center_y = point_1[1] + (dist_y) / 2
+ y_diff = Abs(y - center_y) - (point_2[1] - center_y)
+ outside_distance = sqrt(Max(y_diff, 0) ** 2)
+ inside_distance = Min(y_diff, 0)
+ self.sdf = - (outside_distance + inside_distance)
+ self.bounds = {'x': (min(point_1[0], point_2[0]), max(point_1[0], point_2[0])),
+ 'y': (min(point_1[1], point_2[1]), max(point_1[1], point_2[1]))}
+
+
+class Rectangle(Geometry2D):
+ def __init__(self, point_1, point_2):
+ l, x, y = symbols('l x y')
+ ranges = {l: (0, 1)}
+ dist_x = point_2[0] - point_1[0]
+ dist_y = point_2[1] - point_1[1]
+
+ edge_1 = Edge(functions={'x': l * dist_x + point_1[0],
+ 'y': point_1[1],
+ 'normal_x': 0,
+ 'normal_y': -1},
+ ranges=ranges,
+ area=dist_x)
+ edge_2 = Edge(functions={'x': point_2[0],
+ 'y': l * dist_y + point_1[1],
+ 'normal_x': 1,
+ 'normal_y': 0},
+ ranges=ranges,
+ area=dist_y)
+ edge_3 = Edge(functions={'x': l * dist_x + point_1[0],
+ 'y': point_2[1],
+ 'normal_x': 0,
+ 'normal_y': 1},
+ ranges=ranges,
+ area=dist_x)
+ edge_4 = Edge(functions={'x': point_1[0],
+ 'y': -l * dist_y + point_2[1],
+ 'normal_x': -1,
+ 'normal_y': 0},
+ ranges=ranges,
+ area=dist_y)
+ self.edges = [edge_1, edge_2, edge_3, edge_4]
+ center_x = point_1[0] + (dist_x) / 2
+ center_y = point_1[1] + (dist_y) / 2
+ x_diff = Abs(x - center_x) - (point_2[0] - center_x)
+ y_diff = Abs(y - center_y) - (point_2[1] - center_y)
+ outside_distance = sqrt(Max(x_diff, 0) ** 2 + Max(y_diff, 0) ** 2)
+ inside_distance = Min(Max(x_diff, y_diff), 0)
+ self.sdf = - (outside_distance + inside_distance)
+ self.bounds = {'x': (min(point_1[0], point_2[0]), max(point_1[0], point_2[0])),
+ 'y': (min(point_1[1], point_2[1]), max(point_1[1], point_2[1]))}
+
+
+class Circle(Geometry2D):
+
+ def __init__(self, center, radius):
+ theta, x, y = symbols('theta x y')
+ ranges = {theta: (0, 2 * math.pi)}
+ edge = Edge(functions={'x': center[0] + radius * cos(theta),
+ 'y': center[1] + radius * sin(theta),
+ 'normal_x': 1 * cos(theta),
+ 'normal_y': 1 * sin(theta)},
+ ranges=ranges,
+ area=2 * pi * radius)
+
+ self.edges = [edge]
+ self.sdf = radius - sqrt((x - center[0]) ** 2 + (y - center[1]) ** 2)
+ self.bounds = {'x': (center[0] - radius, center[0] + radius), 'y': (center[1] - radius, center[1] + radius)}
+
+
+class Heart(Geometry2D):
+ def __init__(self, center=(0, 0.5), radius=0.5):
+ c1, c2 = center
+ theta, t, x, y = symbols('t theta x y')
+ ranges = {theta: (0, math.pi), t: (0, 1)}
+ edge_1 = Edge(functions={'x': center[0] - t * radius,
+ 'y': center[1] - (1 - t) * radius,
+ 'normal_x': -1.,
+ 'normal_y': -1.},
+ ranges=ranges,
+ area=math.sqrt(2) * radius)
+
+ edge_2 = Edge(functions={'x': center[0] + t * radius,
+ 'y': center[1] - (1 - t) * radius,
+ 'normal_x': 1.,
+ 'normal_y': -1.},
+ ranges=ranges,
+ area=math.sqrt(2) * radius)
+
+ edge_3 = Edge(functions={'x': center[0] - radius / 2 + radius / math.sqrt(2) * cos(math.pi / 4 * 5 - theta),
+ 'y': center[1] + radius / 2 + radius / math.sqrt(2) * sin(math.pi / 4 * 5 - theta),
+ 'normal_x': cos(math.pi / 4 * 5 - theta),
+ 'normal_y': sin(math.pi / 4 * 5 - theta)},
+ ranges=ranges,
+ area=math.sqrt(2) * radius * math.pi)
+
+ edge_4 = Edge(functions={'x': center[0] + radius / 2 + radius / math.sqrt(2) * cos(math.pi / 4 * 3 - theta),
+ 'y': center[1] + radius / 2 + radius / math.sqrt(2) * sin(math.pi / 4 * 3 - theta),
+ 'normal_x': cos(math.pi / 4 * 3 - theta),
+ 'normal_y': sin(math.pi / 4 * 3 - theta)},
+ ranges=ranges,
+ area=math.sqrt(2) * radius * math.pi)
+
+ self.edges = [edge_1, edge_2, edge_3, edge_4]
+ x, y = symbols('x y')
+ x = (x - c1) * 0.5 / radius
+ y = (y - c2) * 0.5 / radius + 0.5
+ part1 = Heaviside(Abs(x) + y - 1) * (sqrt((Abs(x) - 0.25) ** 2 + (y - 0.75) ** 2) - math.sqrt(2) / 4)
+ part_i = 0.5 * Max(Abs(x) + y, 0)
+ part2 = (1 - Heaviside(Abs(x) + y - 1)) * sign(Abs(x) - y) * Min(sqrt(Abs(x) ** 2 + (y - 1) ** 2),
+ sqrt((Abs(x) - part_i) ** 2 + (
+ y - part_i) ** 2))
+ self.sdf = (-part1 - part2) * radius * 2
+ self.bounds = {'x': (
+ center[0] - 0.5 * radius - 0.5 * math.sqrt(2) * radius,
+ center[0] + 0.5 * radius + 0.5 * math.sqrt(2) * radius),
+ 'y': (center[1] - radius, center[1] + 0.5 * radius + 0.5 * math.sqrt(2) * radius)}
+
+
+class Triangle(Geometry2D):
+ def __init__(self, p0, p1, p2):
+ x, y, t = symbols('x y t')
+ N = CoordSys3D('N')
+ P0 = p0[0] * N.i + p0[1] * N.j
+ P1 = p1[0] * N.i + p1[1] * N.j
+ P2 = p2[0] * N.i + p2[1] * N.j
+ p = x * N.i + y * N.j
+ e0, e1, e2 = P1 - P0, P2 - P1, P0 - P2
+ v0, v1, v2 = p - P0, p - P1, p - P2
+ pq0 = v0 - e0 * Max(Min(v0.dot(e0) / e0.dot(e0), 1), 0)
+ pq1 = v1 - e1 * Max(Min(v1.dot(e1) / e1.dot(e1), 1), 0)
+ pq2 = v2 - e2 * Max(Min(v2.dot(e2) / e2.dot(e2), 1), 0)
+ s = sign(e0.dot(N.i) * e2.dot(N.j) - e0.dot(N.j) * e2.dot(N.i))
+
+ u = sqrt(Min(pq0.dot(pq0), pq1.dot(pq1), pq2.dot(pq2)))
+
+ v = Min(s * (v0.dot(N.i) * e0.dot(N.j) - v0.dot(N.j) * e0.dot(N.i)),
+ s * (v1.dot(N.i) * e1.dot(N.j) - v1.dot(N.j) * e1.dot(N.i)),
+ s * (v2.dot(N.i) * e2.dot(N.j) - v2.dot(N.j) * e2.dot(N.i)))
+ self.sdf = u * sign(v)
+
+ l0 = sqrt(e0.dot(e0))
+ l1 = sqrt(e1.dot(e1))
+ l2 = sqrt(e2.dot(e2))
+ ranges = {t: (0, 1)}
+ in_out_sign = -sign(e0.cross(e1).dot(N.k))
+ edge_1 = Edge(functions={'x': p1[0] + t * (p0[0] - p1[0]),
+ 'y': p1[1] + t * (p0[1] - p1[1]),
+ 'normal_x': (p0[1] - p1[1]) / l0 * in_out_sign,
+ 'normal_y': (p1[0] - p0[0]) / l0 * in_out_sign},
+ ranges=ranges,
+ area=l0)
+ edge_2 = Edge(functions={'x': p2[0] + t * (p1[0] - p2[0]),
+ 'y': p2[1] + t * (p1[1] - p2[1]),
+ 'normal_x': (p1[1] - p2[1]) / l1 * in_out_sign,
+ 'normal_y': (p2[0] - p1[0]) / l1 * in_out_sign},
+ ranges=ranges,
+ area=l1)
+ edge_3 = Edge(functions={'x': p0[0] + t * (p2[0] - p0[0]),
+ 'y': p0[1] + t * (p2[1] - p0[1]),
+ 'normal_x': (p2[1] - p0[1]) / l2 * in_out_sign,
+ 'normal_y': (p0[0] - p2[0]) / l2 * in_out_sign},
+ ranges=ranges,
+ area=l2)
+ self.edges = [edge_1, edge_2, edge_3]
+ self.bounds = {'x': (min(p0[0], p1[0], p2[0]), max(p0[0], p1[0], p2[0])),
+ 'y': (min(p0[1], p1[1], p2[1]), max(p0[1], p1[1], p2[1]))}
+
+
+class Polygon(Geometry2D):
+ def __init__(self, points):
+ v = points
+ t = symbols('t')
+ ranges = {t: (0, 1)}
+
+ def _sdf(x: np.ndarray, y: np.ndarray, **kwargs):
+ s = np.ones_like(x)
+ _points = np.concatenate([x, y], axis=1)
+ d = ((np.array(v[0]) - _points) ** 2).sum(axis=1, keepdims=True)
+ for i in range(len(v)):
+ e = np.array(v[i - 1]) - np.array(v[i])
+ w = _points - np.array(v[i])
+ b = w - e * np.clip((w * e).sum(axis=1, keepdims=True) / (e * e).sum(), 0, 1)
+ d = np.minimum(d, (b * b).sum(keepdims=True, axis=1))
+ cond1 = _points[:, 1:] >= v[i][1]
+ cond2 = _points[:, 1:] < v[i - 1][1]
+ cond3 = e[0] * w[:, 1:] > e[1] * w[:, :1]
+ inverse_idx1 = np.all([cond1, cond2, cond3], axis=0)
+ inverse_idx2 = np.all([np.logical_not(cond1), np.logical_not(cond2), np.logical_not(cond3)], axis=0)
+ inverse_idx = np.any([inverse_idx1, inverse_idx2], axis=0)
+ s[inverse_idx] *= -1
+ return -np.sqrt(d) * s
+
+ self.sdf = _sdf
+ self.edges = []
+ for i, _ in enumerate(points):
+ length = math.sqrt((points[i - 1][0] - points[i][0]) ** 2 + (points[i - 1][1] - points[i][1]) ** 2)
+ edge = Edge(functions={'x': points[i - 1][0] - t * (points[i - 1][0] - points[i][0]),
+ 'y': points[i - 1][1] - t * (points[i - 1][1] - points[i][1]),
+ 'normal_x': (points[i][1] - points[i - 1][1]) / length,
+ 'normal_y': (points[i - 1][0] - points[i][0]) / length},
+ ranges=ranges,
+ area=length)
+ self.edges.append(edge)
+ _p = iter(zip(*points))
+ _p1 = next(_p)
+ _p2 = next(_p)
+ self.bounds = {'x': (min(_p1), max(_p1)),
+ 'y': (min(_p2), max(_p2))}
+
+ def translation(self, direction: Union[List, Tuple]):
+ raise NotImplementedError
+
+ def rotation(self, angle: float, axis: str = 'z', center=None):
+ raise NotImplementedError
+
+ def scaling(self, scale: float, center: Tuple = None):
+ raise NotImplementedError
+
+
+class Plane(Geometry3D):
+
+ def __init__(self, point_1, point_2, normal):
+ assert point_1[0] == point_2[0], "Points must have the same x coordinate"
+
+ x, y, z, s_1, s_2 = symbols('x y z s_1 s_2')
+ center = (point_1[0] + (point_2[0] - point_1[0]) / 2,
+ point_1[1] + (point_2[1] - point_1[1]) / 2,
+ point_1[2] + (point_2[2] - point_1[2]) / 2)
+ side_y = point_2[1] - point_1[1]
+ side_z = point_2[2] - point_1[2]
+
+ ranges = {s_1: (-1, 1), s_2: (-1, 1)}
+ edge = Edge(functions={'x': center[0],
+ 'y': center[1] + 0.5 * s_1 * side_y,
+ 'z': center[2] + 0.5 * s_2 * side_z,
+ 'normal_x': 1e-10 + normal, # TODO rm 1e-10
+ 'normal_y': 0,
+ 'normal_z': 0},
+ ranges=ranges,
+ area=side_y * side_z)
+ self.edges = [edge]
+
+ self.sdf = normal * (center[0] - x)
+
+ self.bounds = {'x': (min(point_1[0], point_2[0]), max(point_1[0], point_2[0])),
+ 'y': (min(point_1[1], point_2[1]), max(point_1[1], point_2[1])),
+ 'z': (min(point_1[2], point_2[2]), max(point_1[2], point_2[2])), }
+
+
+class Tube3D(Geometry3D):
+
+ def __init__(self, point_1, point_2):
+ x, y, z, s_1, s_2 = symbols('x y z s_1 s_2')
+ center = (point_1[0] + (point_2[0] - point_1[0]) / 2,
+ point_1[1] + (point_2[1] - point_1[1]) / 2,
+ point_1[2] + (point_2[2] - point_1[2]) / 2)
+ side_x = point_2[0] - point_1[0]
+ side_y = point_2[1] - point_1[1]
+ side_z = point_2[2] - point_1[2]
+
+ ranges = {s_1: (-1, 1), s_2: (-1, 1)}
+ edge_1 = Edge(functions={'x': center[0] + 0.5 * s_1 * side_x,
+ 'y': center[1] + 0.5 * s_2 * side_y,
+ 'z': center[2] + 0.5 * side_z,
+ 'normal_x': 0,
+ 'normal_y': 0,
+ 'normal_z': 1},
+ ranges=ranges,
+ area=side_x * side_y)
+ edge_2 = Edge(functions={'x': center[0] + 0.5 * s_1 * side_x,
+ 'y': center[1] + 0.5 * s_2 * side_y,
+ 'z': center[2] - 0.5 * side_z,
+ 'normal_x': 0,
+ 'normal_y': 0,
+ 'normal_z': -1},
+ ranges=ranges,
+ area=side_x * side_y)
+ edge_3 = Edge(functions={'x': center[0] + 0.5 * s_1 * side_x,
+ 'y': center[1] + 0.5 * side_y,
+ 'z': center[2] + 0.5 * s_2 * side_z,
+ 'normal_x': 0,
+ 'normal_y': 1,
+ 'normal_z': 0},
+ ranges=ranges,
+ area=side_x * side_z)
+ edge_4 = Edge(functions={'x': center[0] + 0.5 * s_1 * side_x,
+ 'y': center[1] - 0.5 * side_y,
+ 'z': center[2] + 0.5 * s_2 * side_z,
+ 'normal_x': 0,
+ 'normal_y': -1,
+ 'normal_z': 0},
+ ranges=ranges,
+ area=side_x * side_z)
+ self.edges = [edge_1, edge_2, edge_3, edge_4]
+ y_dist = Abs(y - center[1]) - 0.5 * side_y
+ z_dist = Abs(z - center[2]) - 0.5 * side_z
+ outside_distance = sqrt(Max(y_dist, 0) ** 2 + Max(z_dist, 0) ** 2)
+ inside_distance = Min(Max(y_dist, z_dist), 0)
+ self.sdf = - (outside_distance + inside_distance)
+
+ self.bounds = {'x': (min(point_1[0], point_2[0]), max(point_1[0], point_2[0])),
+ 'y': (min(point_1[1], point_2[1]), max(point_1[1], point_2[1])),
+ 'z': (min(point_1[2], point_2[2]), max(point_1[2], point_2[2])), }
+
+
+class Tube(Tube3D):
+ def __init__(self, point_1, point_2):
+ super(Tube, self).__init__(point_1, point_2)
+
+
+class CircularTube(Geometry3D):
+ def __init__(self, center, radius, height):
+ x, y, z, h, theta = symbols('x y z h theta')
+ ranges = {h: (-1, 1), theta: (0, 2 * pi)}
+ edge_1 = Edge(functions={'x': center[0] + radius * cos(theta),
+ 'y': center[1] + radius * sin(theta),
+ 'z': center[2] + 0.5 * h * height,
+ 'normal_x': 1 * cos(theta),
+ 'normal_y': 1 * sin(theta),
+ 'normal_z': 0},
+ ranges=ranges,
+ area=height * 2 * pi * radius)
+
+ self.edges = [edge_1]
+ self.sdf = radius - sqrt((x - center[0]) ** 2 + (y - center[1]) ** 2)
+
+ self.bounds = {'x': (center[0] - radius, center[0] + radius),
+ 'y': (center[1] - radius, center[1] + radius),
+ 'z': (center[2] - height / 2, center[2] + height / 2)}
+
+
+class Box(Geometry3D):
+ def __init__(self, point_1, point_2):
+ x, y, z, s_1, s_2 = symbols('x y z s_1 s_2')
+ center = (point_1[0] + (point_2[0] - point_1[0]) / 2,
+ point_1[1] + (point_2[1] - point_1[1]) / 2,
+ point_1[2] + (point_2[2] - point_1[2]) / 2)
+ side_x = point_2[0] - point_1[0]
+ side_y = point_2[1] - point_1[1]
+ side_z = point_2[2] - point_1[2]
+
+ ranges = {s_1: (-1, 1), s_2: (-1, 1)}
+
+ self.bounds = {'x': (min(point_1[0], point_2[0]), max(point_1[0], point_2[0])),
+ 'y': (min(point_1[1], point_2[1]), max(point_1[1], point_2[1])),
+ 'z': (min(point_1[2], point_2[2]), max(point_1[2], point_2[2])), }
+
+ edge_1 = Edge(functions={'x': center[0] + 0.5 * s_1 * side_x,
+ 'y': center[1] + 0.5 * s_2 * side_y,
+ 'z': center[2] + 0.5 * side_z,
+ 'normal_x': 0,
+ 'normal_y': 0,
+ 'normal_z': 1},
+ ranges=ranges,
+ area=side_x * side_y)
+ edge_2 = Edge(functions={'x': center[0] + 0.5 * s_1 * side_x,
+ 'y': center[1] + 0.5 * s_2 * side_y,
+ 'z': center[2] - 0.5 * side_z,
+ 'normal_x': 0,
+ 'normal_y': 0,
+ 'normal_z': -1},
+ ranges=ranges,
+ area=side_x * side_y)
+ edge_3 = Edge(functions={'x': center[0] + 0.5 * s_1 * side_x,
+ 'y': center[1] + 0.5 * side_y,
+ 'z': center[2] + 0.5 * s_2 * side_z,
+ 'normal_x': 0,
+ 'normal_y': 1,
+ 'normal_z': 0},
+ ranges=ranges,
+ area=side_x * side_z)
+ edge_4 = Edge(functions={'x': center[0] + 0.5 * s_1 * side_x,
+ 'y': center[1] - 0.5 * side_y,
+ 'z': center[2] + 0.5 * s_2 * side_z,
+ 'normal_x': 0,
+ 'normal_y': -1,
+ 'normal_z': 0},
+ ranges=ranges,
+ area=side_x * side_z)
+ edge_5 = Edge(functions={'x': center[0] + 0.5 * side_x,
+ 'y': center[1] + 0.5 * s_1 * side_y,
+ 'z': center[2] + 0.5 * s_2 * side_z,
+ 'normal_x': 1,
+ 'normal_y': 0,
+ 'normal_z': 0},
+ ranges=ranges,
+ area=side_y * side_z)
+ edge_6 = Edge(functions={'x': center[0] - 0.5 * side_x,
+ 'y': center[1] + 0.5 * s_1 * side_y,
+ 'z': center[2] + 0.5 * s_2 * side_z,
+ 'normal_x': -1,
+ 'normal_y': 0,
+ 'normal_z': 0},
+ ranges=ranges,
+ area=side_y * side_z)
+ self.edges = [edge_1, edge_2, edge_3, edge_4, edge_5, edge_6]
+ x_dist = Abs(x - center[0]) - 0.5 * side_x
+ y_dist = Abs(y - center[1]) - 0.5 * side_y
+ z_dist = Abs(z - center[2]) - 0.5 * side_z
+ outside_distance = sqrt(Max(x_dist, 0) ** 2 + Max(y_dist, 0) ** 2 + Max(z_dist, 0) ** 2)
+ inside_distance = Min(Max(x_dist, y_dist, z_dist), 0)
+ self.sdf = - (outside_distance + inside_distance)
+ self.bounds = {'x': (min(point_1[0], point_2[0]), max(point_1[0], point_2[0])),
+ 'y': (min(point_1[1], point_2[1]), max(point_1[1], point_2[1])),
+ 'z': (min(point_1[2], point_2[2]), max(point_1[2], point_2[2])), }
+
+
+class Sphere(Geometry3D):
+
+ def __init__(self, center, radius):
+ x, y, z, v_1, v_2, u_1, u_2 = symbols('x y z v_1 v_2 u_1 u_2')
+ ranges = {v_1: (0, 1), v_2: (0, 1), u_1: (0, 1), u_2: (0, 1)}
+ r_1 = sqrt(-log(v_1)) * cos(2 * pi * u_1)
+ r_2 = sqrt(-log(v_1)) * sin(2 * pi * u_1)
+ r_3 = sqrt(-log(v_2)) * cos(2 * pi * u_2)
+
+ norm = sqrt(r_1 ** 2 + r_2 ** 2 + r_3 ** 2)
+ edge_1 = Edge(functions={'x': center[0] + radius * r_1 / norm,
+ 'y': center[1] + radius * r_2 / norm,
+ 'z': center[2] + radius * r_3 / norm,
+ 'normal_x': r_1 / norm,
+ 'normal_y': r_2 / norm,
+ 'normal_z': r_3 / norm},
+ ranges=ranges,
+ area=4 * pi * radius ** 2)
+
+ self.edges = [edge_1]
+ self.sdf = radius - sqrt((x - center[0]) ** 2 + (y - center[1]) ** 2 + (z - center[2]) ** 2)
+ self.bounds = {'x': (center[0] - radius, center[0] + radius),
+ 'y': (center[1] - radius, center[1] + radius),
+ 'z': (center[2] - radius, center[2] + radius)}
+
+
+class Cylinder(Geometry3D):
+
+ def __init__(self, center, radius, height):
+ x, y, z, h, r, theta = symbols('x y z h r theta')
+ ranges = {h: (-1, 1), r: (0, 1), theta: (0, 2 * pi)}
+ edge_1 = Edge(functions={'x': center[0] + radius * cos(theta),
+ 'y': center[1] + radius * sin(theta),
+ 'z': center[2] + 0.5 * h * height,
+ 'normal_x': 1 * cos(theta),
+ 'normal_y': 1 * sin(theta),
+ 'normal_z': 0},
+ ranges=ranges,
+ area=height * 2 * pi * radius)
+ edge_2 = Edge(functions={'x': center[0] + sqrt(r) * radius * cos(theta),
+ 'y': center[1] + sqrt(r) * radius * sin(theta),
+ 'z': center[2] + 0.5 * height,
+ 'normal_x': 0,
+ 'normal_y': 0,
+ 'normal_z': 1},
+ ranges=ranges,
+ area=math.pi * radius ** 2)
+ edge_3 = Edge(functions={'x': center[0] + sqrt(r) * radius * cos(theta),
+ 'y': center[1] + sqrt(r) * radius * sin(theta),
+ 'z': center[2] - 0.5 * height,
+ 'normal_x': 0,
+ 'normal_y': 0,
+ 'normal_z': -1},
+ ranges=ranges,
+ area=pi * radius ** 2)
+ self.edges = [edge_1, edge_2, edge_3]
+
+ r_dist = sqrt((x - center[0]) ** 2 + (y - center[1]) ** 2)
+ z_dist = Abs(z - center[2])
+ outside_distance = sqrt(Min(0, radius - r_dist) ** 2 + Min(0, 0.5 * height - z_dist) ** 2)
+ inside_distance = -1 * Min(Abs(Min(0, r_dist - radius)), Abs(Min(0, z_dist - 0.5 * height)))
+ self.sdf = - (outside_distance + inside_distance)
+
+ self.bounds = {'x': (center[0] - radius, center[0] + radius),
+ 'y': (center[1] - radius, center[1] + radius),
+ 'z': (center[2] - height / 2, center[2] + height / 2)}
diff --git a/idrlnet/geo_utils/sympy_np.py b/idrlnet/geo_utils/sympy_np.py
new file mode 100644
index 0000000..320e5c0
--- /dev/null
+++ b/idrlnet/geo_utils/sympy_np.py
@@ -0,0 +1,170 @@
+"""Convert sympy expression to np functions
+todo: converges to torch_util
+
+"""
+
+import numpy as np
+from sympy import lambdify
+from typing import Iterable
+from functools import reduce
+import collections
+from sympy import Max, Min, Mul
+
+__all__ = ['lambdify_np']
+
+
+class WrapSympy:
+ is_sympy = True
+
+ @staticmethod
+ def _wrapper_guide(args):
+ func_1 = args[0]
+ func_2 = args[1]
+ cond_1 = (isinstance(func_1, WrapSympy) and not func_1.is_sympy)
+ cond_2 = isinstance(func_2, WrapSympy) and not func_2.is_sympy
+ cond_3 = (not isinstance(func_1, WrapSympy)) and isinstance(func_1, collections.Callable)
+ cond_4 = (not isinstance(func_2, WrapSympy)) and isinstance(func_2, collections.Callable)
+ return cond_1 or cond_2 or cond_3 or cond_4, func_1, func_2
+
+
+class WrapMax(Max, WrapSympy):
+ def __new__(cls, *args, **kwargs):
+ cond, func_1, func_2 = WrapMax._wrapper_guide(args)
+ if cond:
+ a = object.__new__(cls)
+ a.f = func_1
+ a.g = func_2
+ a.is_sympy = False
+ else:
+ a = Max.__new__(cls, *args, **kwargs)
+ if isinstance(a, WrapSympy):
+ a.is_sympy = True
+ return a
+
+ def __call__(self, **x):
+ if not self.is_sympy:
+ f = lambdify_np(self.f, x.keys())
+ g = lambdify_np(self.g, x.keys())
+ return np.maximum(f(**x), g(**x))
+ else:
+ f = lambdify_np(self, x.keys())
+ return f(**x)
+
+
+class WrapMul(Mul, WrapSympy):
+ def __new__(cls, *args, **kwargs):
+ cond, func_1, func_2 = WrapMul._wrapper_guide(args)
+ if cond:
+ a = object.__new__(cls)
+ a.f = func_1
+ a.g = func_2
+ a.is_sympy = False
+ else:
+ a = Mul.__new__(cls, *args, **kwargs)
+ if isinstance(a, WrapSympy):
+ a.is_sympy = True
+ return a
+
+ def __call__(self, **x):
+ if not self.is_sympy:
+ f = lambdify_np(self.f, x.keys())
+ g = lambdify_np(self.g, x.keys())
+ return f(**x) * g(**x)
+ else:
+ f = lambdify_np(self, x.keys())
+ return f(**x)
+
+
+class WrapMin(Min, WrapSympy):
+ def __new__(cls, *args, **kwargs):
+ cond, func_1, func_2 = WrapMin._wrapper_guide(args)
+ if cond:
+ a = object.__new__(cls)
+ a.f = func_1
+ a.g = func_2
+ a.is_sympy = False
+ else:
+ a = Min.__new__(cls, *args, **kwargs)
+ if isinstance(a, WrapSympy):
+ a.is_sympy = True
+ return a
+
+ def __call__(self, **x):
+ if not self.is_sympy:
+ f = lambdify_np(self.f, x.keys())
+ g = lambdify_np(self.g, x.keys())
+ return np.minimum(f(**x), g(**x))
+ else:
+ f = lambdify_np(self, x.keys())
+ return f(**x)
+
+
+def _try_float(fn):
+ try:
+ fn = float(fn)
+ except ValueError:
+ pass
+ except TypeError:
+ pass
+ return fn
+
+
+def _constant_bool(boolean: bool):
+ def fn(**x):
+ return np.ones_like(next(iter(x.items()))[1], dtype=bool) if boolean else np.zeros_like(
+ next(iter(x.items()))[1], dtype=bool)
+
+ return fn
+
+
+def _constant_float(f):
+ def fn(**x):
+ return np.ones_like(next(iter(x.items()))[1]) * f
+
+ return fn
+
+
+def lambdify_np(f, r: Iterable):
+ if isinstance(r, dict):
+ r = r.keys()
+ if isinstance(f, WrapSympy) and f.is_sympy:
+ lambdify_f = lambdify([k for k in r], f, [PLACEHOLDER, 'numpy'])
+ lambdify_f.input_keys = [k for k in r]
+ return lambdify_f
+ if isinstance(f, WrapSympy) and not f.is_sympy:
+ return f
+ if isinstance(f, collections.Callable):
+ return f
+ if isinstance(f, bool):
+ return _constant_bool(f)
+ f = _try_float(f)
+ if isinstance(f, float):
+ return _constant_float(f)
+ else:
+ lambdify_f = lambdify([k for k in r], f, [PLACEHOLDER, 'numpy'])
+ lambdify_f.input_keys = [k for k in r]
+ return lambdify_f
+
+
+PLACEHOLDER = {'amin': lambda x: reduce(lambda y, z: np.minimum(y, z), x),
+ 'amax': lambda x: reduce(lambda y, z: np.maximum(y, z), x),
+ 'Min': lambda *x: reduce(lambda y, z: np.minimum(y, z), x),
+ 'Max': lambda *x: reduce(lambda y, z: np.maximum(y, z), x),
+ 'Heaviside': lambda x: np.heaviside(x, 0),
+ 'equal': lambda x, y: np.isclose(x, y),
+ 'Xor': np.logical_xor,
+ 'cos': np.cos,
+ 'sin': np.sin,
+ 'tan': np.tan,
+ 'exp': np.exp,
+ 'sqrt': np.sqrt,
+ 'log': np.log,
+ 'sinh': np.sinh,
+ 'cosh': np.cosh,
+ 'tanh': np.tanh,
+ 'asin': np.arcsin,
+ 'acos': np.arccos,
+ 'atan': np.arctan,
+ 'Abs': np.abs,
+ 'DiracDelta': np.zeros_like,
+ }
diff --git a/idrlnet/graph.py b/idrlnet/graph.py
new file mode 100644
index 0000000..3c6d545
--- /dev/null
+++ b/idrlnet/graph.py
@@ -0,0 +1,200 @@
+"""Define Computational graph"""
+
+import sympy as sp
+from typing import List, Dict, Union
+from copy import copy
+from collections import defaultdict
+import networkx as nx
+import matplotlib.pyplot as plt
+import math
+from idrlnet.variable import Variables
+from idrlnet.node import Node
+from idrlnet.header import logger, DIFF_SYMBOL
+from idrlnet.pde import PdeNode
+from idrlnet.net import NetNode
+
+__all__ = ['ComputableNodeList', 'Vertex', 'VertexTaskPipeline']
+x, y = sp.symbols('x y')
+ComputableNodeList = [List[Union[PdeNode, NetNode]]]
+
+
+class Vertex(Node):
+ counter = 0
+
+ def __init__(self, pre=None, next=None, node=None, ntype='c'):
+ node = Node() if node is None else node
+ self.__dict__ = node.__dict__.copy()
+ self.index = type(self).counter
+ type(self).counter += 1
+ self.pre = pre if pre is not None else set()
+ self.next = next if pre is not None else set()
+ self.ntype = ntype
+ assert self.ntype in ('d', 'c', 'r')
+
+ def __eq__(self, other):
+ return self.index == other.index
+
+ def __hash__(self):
+ return self.index
+
+ def __str__(self):
+ info = f"index: {self.index}\n" + f"pre: {[node.index for node in self.pre]}\n" \
+ + f"next: {[node.index for node in self.next]}\n"
+ return super().__str__() + info
+
+
+class VertexTaskPipeline:
+ MAX_STACK_ALLOWED = 100000
+
+ @property
+ def evaluation_order_list(self):
+ return self._evaluation_order_list
+
+ @evaluation_order_list.setter
+ def evaluation_order_list(self, evaluation_order_list):
+ self._evaluation_order_list = evaluation_order_list
+
+ def __init__(self, nodes: ComputableNodeList, invar: Variables, req_names: List[str]):
+ self.nodes = nodes
+ self.req_names = req_names
+ self.computable = set(invar.keys())
+
+ graph_nodes = set(Vertex(node=node) for node in nodes)
+ req_name_dict: Dict[str, List[Vertex]] = defaultdict(list)
+
+ self.G = nx.DiGraph()
+ self.egde_data = defaultdict(set)
+ required_stack = []
+ for req_name in req_names:
+ final_graph_node = Vertex()
+ if DIFF_SYMBOL in req_name:
+ final_graph_node.derivatives = (req_name,)
+ final_graph_node.inputs = tuple()
+ else:
+ final_graph_node.inputs = [req_name]
+ final_graph_node.derivatives = tuple()
+ final_graph_node.outputs = tuple()
+ final_graph_node.name = f'<{req_name}>'
+ final_graph_node.ntype = 'r'
+ graph_nodes.add(final_graph_node)
+ req_name_dict[req_name].append(final_graph_node)
+ required_stack.append(final_graph_node)
+ final_graph_node.evaluate = lambda x: x
+
+ logger.info('Constructing computation graph...')
+ while len(req_name_dict) > 0:
+ to_be_removed = set()
+ to_be_added = defaultdict(list)
+ if len(required_stack) >= self.MAX_STACK_ALLOWED:
+ raise ValueError
+ for req_name, current_gn in req_name_dict.items():
+ req_name = tuple(req_name.split(DIFF_SYMBOL))
+ match_score = -1
+ match_gn = None
+ for gn in graph_nodes:
+ if gn in current_gn:
+ continue
+ for output in gn.outputs:
+ output = tuple(output.split(DIFF_SYMBOL))
+ if len(output) <= len(req_name) and req_name[:len(output)] == output and len(
+ output) > match_score:
+ match_score = len(output)
+ match_gn = gn
+ for p_in in invar.keys():
+ p_in = tuple(p_in.split(DIFF_SYMBOL))
+ if len(p_in) <= len(req_name) and req_name[:len(p_in)] == p_in and len(
+ p_in) > match_score:
+ match_score = len(p_in)
+ match_gn = None
+ for sub_gn in req_name_dict[DIFF_SYMBOL.join(req_name)]:
+ self.G.add_edge(DIFF_SYMBOL.join(p_in), sub_gn.name)
+ if match_score <= 0:
+ raise Exception("Can't be computed: " + DIFF_SYMBOL.join(req_name))
+ elif match_gn is not None:
+ for sub_gn in req_name_dict[DIFF_SYMBOL.join(req_name)]:
+ logger.info(f'{sub_gn.name}.{DIFF_SYMBOL.join(req_name)} <---- {match_gn.name}')
+ match_gn.next.add(sub_gn)
+ self.egde_data[(match_gn.name, sub_gn.name)].add(DIFF_SYMBOL.join(req_name))
+ required_stack.append(match_gn)
+ for sub_gn in req_name_dict[DIFF_SYMBOL.join(req_name)]:
+ sub_gn.pre.add(match_gn)
+ for p in match_gn.inputs:
+ to_be_added[p].append(match_gn)
+ for p in match_gn.derivatives:
+ to_be_added[p].append(match_gn)
+ for sub_gn in req_name_dict[DIFF_SYMBOL.join(req_name)]:
+ self.G.add_edge(match_gn.name, sub_gn.name)
+ to_be_removed.add(DIFF_SYMBOL.join(req_name))
+ if len(to_be_removed) == 0 and len(req_name_dict) > 0:
+ raise Exception("Can't be computed")
+ for p in to_be_removed:
+ req_name_dict.pop(p)
+ self.computable.add(p)
+ for k, v in to_be_added.items():
+ if k in req_name_dict:
+ req_name_dict[k].extend(v)
+ else:
+ req_name_dict[k] = v
+ evaluation_order = []
+ while len(required_stack) > 0:
+ gn = required_stack.pop()
+ if gn not in evaluation_order:
+ evaluation_order.append(gn)
+ self.computable = self.computable.union(set(gn.outputs))
+ self.evaluation_order_list = evaluation_order
+ self._graph_node_table = {node.name: node for node in graph_nodes}
+ for key in invar:
+ node = Vertex()
+ node.name = key
+ node.outputs = (key,)
+ node.inputs = tuple()
+ node.ntype = 'd'
+ self._graph_node_table[key] = node
+ logger.info('Computation graph constructed.')
+
+ def operation_order(self, invar: Variables):
+ for node in self.evaluation_order_list:
+ if not set(node.derivatives).issubset(invar.keys()):
+ invar.differentiate_(independent_var=invar, required_derivatives=node.derivatives)
+ invar.update(node.evaluate({**invar.subset(node.inputs), **invar.subset(node.derivatives)}))
+
+ def forward_pipeline(self, invar: Variables, req_names: List[str] = None) -> Variables:
+ if req_names is None or set(req_names).issubset(set(self.computable)):
+ outvar = copy(invar)
+ self.operation_order(outvar)
+ return outvar.subset(self.req_names if req_names is None else req_names)
+ else:
+ logger.info('The existing graph fails. Construct a temporary graph...')
+ return VertexTaskPipeline(self.nodes, invar, req_names).forward_pipeline(invar)
+
+ def to_json(self):
+ pass
+
+ def display(self, filename: str = None):
+ _, ax = plt.subplots(1, 1, figsize=(8, 8))
+ ax.axis('off')
+ pos = nx.spring_layout(self.G, k=10 / (math.sqrt(self.G.order()) + 0.1))
+ nx.draw_networkx_nodes(self.G, pos,
+ nodelist=list(
+ node for node in self.G.nodes if self._graph_node_table[node].ntype == 'c'),
+ cmap=plt.get_cmap('jet'),
+ node_size=1300, node_color="pink", alpha=0.5)
+ nx.draw_networkx_nodes(self.G, pos,
+ nodelist=list(
+ node for node in self.G.nodes if self._graph_node_table[node].ntype == 'r'),
+ cmap=plt.get_cmap('jet'),
+ node_size=1300, node_color="green", alpha=0.3)
+ nx.draw_networkx_nodes(self.G, pos,
+ nodelist=list(
+ node for node in self.G.nodes if self._graph_node_table[node].ntype == 'd'),
+ cmap=plt.get_cmap('jet'),
+ node_size=1300, node_color="blue", alpha=0.3)
+ nx.draw_networkx_edges(self.G, pos, edge_color='r', arrows=True, arrowsize=30, arrowstyle="-|>")
+ nx.draw_networkx_labels(self.G, pos)
+ nx.draw_networkx_edge_labels(self.G, pos, edge_labels={k: ", ".join(v) for k, v in self.egde_data.items()},
+ font_size=10)
+ if filename is None:
+ plt.show()
+ else:
+ plt.savefig(filename)
+ plt.close()
diff --git a/idrlnet/header.py b/idrlnet/header.py
new file mode 100644
index 0000000..b6b0df4
--- /dev/null
+++ b/idrlnet/header.py
@@ -0,0 +1,42 @@
+"""Initialize public objects"""
+
+import logging
+import functools
+
+DIFF_SYMBOL = "__"
+
+
+class TestFun:
+ registered = []
+
+ def __init__(self, fun):
+ self.fun = fun
+ self.registered.append(self)
+
+ def __call__(self, *args, **kwargs):
+ print(str(self.fun.__name__).center(50, '*'))
+ self.fun()
+
+ @staticmethod
+ def run():
+ for fun in TestFun.registered:
+ fun()
+
+
+def testmemo(fun):
+ @functools.wraps(fun)
+ def wrapper(*args, **kwargs):
+ if id(fun) not in testmemo.memo:
+ logger.info(f"'{fun}' needs tests")
+ testmemo.memo.add(id(fun))
+ fun(*args, **kwargs)
+
+ return wrapper
+
+
+testmemo.memo = set()
+
+log_format = '[%(asctime)s] [%(levelname)s] %(message)s'
+handlers = [logging.FileHandler('train.log', mode='a'), logging.StreamHandler()]
+logging.basicConfig(format=log_format, level=logging.INFO, datefmt='%d-%b-%y %H:%M:%S', handlers=handlers)
+logger = logging.getLogger(__name__)
diff --git a/idrlnet/net.py b/idrlnet/net.py
new file mode 100644
index 0000000..3f31f04
--- /dev/null
+++ b/idrlnet/net.py
@@ -0,0 +1,93 @@
+"""Define NetNode"""
+import torch
+from idrlnet.node import Node
+from typing import Tuple, List, Dict, Union
+from contextlib import ExitStack
+
+__all__ = ['NetNode']
+
+
+class WrapEvaluate:
+ def __init__(self, binding_node: 'NetNode'):
+ self.binding_node = binding_node
+
+ def __call__(self, inputs):
+ keep_type = None
+ if isinstance(inputs, dict):
+ keep_type = dict
+ inputs = torch.cat(
+ [torch.tensor(inputs[key], dtype=torch.float32) if not isinstance(inputs[key], torch.Tensor) else
+ inputs[
+ key] for key in inputs], dim=1)
+ with ExitStack() as es:
+ if self.binding_node.require_no_grad:
+ es.enter_context(torch.no_grad())
+ output_var = self.binding_node.net(inputs)
+ if keep_type == dict:
+ output_var = {outkey: output_var[:, i:i + 1] for i, outkey in enumerate(self.binding_node.outputs)}
+ return output_var
+
+
+class NetNode(Node):
+ counter = 0
+
+ @property
+ def fixed(self):
+ return self._fixed
+
+ @fixed.setter
+ def fixed(self, fixed: bool):
+ self._fixed = fixed
+
+ @property
+ def require_no_grad(self):
+ return self._require_no_grad
+
+ @require_no_grad.setter
+ def require_no_grad(self, require_no_grad: bool):
+ self._require_no_grad = require_no_grad
+
+ @property
+ def is_reference(self):
+ return self._is_reference
+
+ @is_reference.setter
+ def is_reference(self, is_reference: bool):
+ self._is_reference = is_reference
+
+ @property
+ def net(self):
+ return self._net
+
+ @net.setter
+ def net(self, net):
+ self._net = net
+
+ def __init__(self, inputs: Union[Tuple, List[str]], outputs: Union[Tuple, List[str]],
+ net: torch.nn.Module, fixed: bool = False, require_no_grad: bool = False, is_reference=False,
+ name=None, *args, **kwargs):
+ self.is_reference = is_reference
+ self.inputs: Union[Tuple, List[str]] = inputs
+ self.outputs: Union[Tuple, List[str]] = outputs
+ self.derivatives: Union[Tuple, List[str]] = []
+ self.net: torch.nn.Module = net
+ self.require_no_grad = require_no_grad
+ self.fixed = fixed
+ if name is not None:
+ self.name = name
+ else:
+ # todo: make sure this is working
+ self.name: str = "net_{}".format(type(self).counter)
+ type(self).counter += 1
+ self.evaluate = WrapEvaluate(binding_node=self)
+
+ def __str__(self):
+ basic_info = super().__str__()
+
+ return basic_info + str(self.net)
+
+ def load_state_dict(self, state_dict: Dict[str, torch.Tensor], strict: bool = True):
+ return self.net.load_state_dict(state_dict, strict)
+
+ def state_dict(self, destination=None, prefix: str = '', keep_vars: bool = False):
+ return self.net.state_dict(destination, prefix, keep_vars)
diff --git a/idrlnet/node.py b/idrlnet/node.py
new file mode 100644
index 0000000..9074b55
--- /dev/null
+++ b/idrlnet/node.py
@@ -0,0 +1,99 @@
+"""Define Basic Node"""
+from typing import Callable, List
+
+from idrlnet.torch_util import torch_lambdify
+from idrlnet.variable import Variables
+from idrlnet.header import DIFF_SYMBOL
+
+__all__ = ['Node']
+
+
+class Node(object):
+ @property
+ def inputs(self) -> List[str]:
+ try:
+ return self._inputs
+ except:
+ self._inputs = tuple()
+ return self._inputs
+
+ @inputs.setter
+ def inputs(self, inputs: List[str]):
+ self._inputs = inputs
+
+ @property
+ def outputs(self) -> List[str]:
+ try:
+ return self._outputs
+ except:
+ self._outputs = tuple()
+ return self._outputs
+
+ @outputs.setter
+ def outputs(self, outputs: List[str]):
+ self._outputs = outputs
+
+ @property
+ def derivatives(self) -> List[str]:
+ try:
+ return self._derivatives
+ except:
+ self._derivatives = []
+ return self._derivatives
+
+ @derivatives.setter
+ def derivatives(self, derivatives: List[str]):
+ self._derivatives = derivatives
+
+ @property
+ def evaluate(self) -> Callable:
+ return self._evaluate
+
+ @evaluate.setter
+ def evaluate(self, evaluate: Callable):
+ self._evaluate = evaluate
+
+ @property
+ def name(self) -> str:
+ try:
+ return self._name
+ except:
+ self._name = 'Node' + str(id(self))
+ return self._name
+
+ @name.setter
+ def name(self, name: str):
+ self._name = name
+
+ @classmethod
+ def new_node(cls, name: str = None, tf_eq: Callable = None, free_symbols: List[str] = None, *args,
+ **kwargs) -> 'Node':
+ node = cls()
+ node.evaluate = LambdaTorchFun(free_symbols, tf_eq, name)
+ node.inputs = [x for x in free_symbols if DIFF_SYMBOL not in x]
+ node.derivatives = [x for x in free_symbols if DIFF_SYMBOL in x]
+ node.outputs = [name, ]
+ node.name = name
+ return node
+
+ def __str__(self):
+ str_list = ["Basic properties:\n",
+ "name: {}\n".format(self.name),
+ "inputs: {}\n".format(self.inputs),
+ "derivatives: {}\n".format(self.derivatives),
+ "outputs: {}\n".format(self.outputs), ]
+ return ''.join(str_list)
+
+
+class LambdaTorchFun:
+ def __init__(self, free_symbols, tf_eq, name):
+ self.lambda_tf_eq = torch_lambdify(free_symbols, tf_eq)
+ self.tf_eq = tf_eq
+ self.name = name
+ self.free_symbols = free_symbols
+
+ def __call__(self, var: Variables):
+ new_var = {}
+ for key, values in var.items():
+ new_var[key] = values
+ return {self.name: self.lambda_tf_eq(**new_var)}
diff --git a/idrlnet/optim.py b/idrlnet/optim.py
new file mode 100644
index 0000000..ea24678
--- /dev/null
+++ b/idrlnet/optim.py
@@ -0,0 +1,82 @@
+"""Define Optimizers and LR schedulers"""
+
+import abc
+import torch
+import inspect
+import math
+from typing import Dict
+
+__all__ = ['get_available_class', 'Optimizable']
+
+
+def get_available_class(module, class_name) -> Dict[str, type]:
+ """Search specified subclasses of the given class in module.
+
+ :param module: The module name
+ :type module: module
+ :param class_name: the parent class
+ :type class_name: type
+ :return: A dict mapping from subclass.name to subclass
+ :rtype: Dict[str, type]
+ """
+ return dict(filter(
+ lambda x: inspect.isclass(x[1])
+ and issubclass(x[1], class_name)
+ and (not x[1] == class_name),
+ inspect.getmembers(module)))
+
+
+class Optimizable(metaclass=abc.ABCMeta):
+ """An abstract class for organizing optimization related configuration and operations.
+ The interface is implemented by solver.Solver
+ """
+ OPTIMIZER_MAP = get_available_class(module=torch.optim, class_name=torch.optim.Optimizer)
+ SCHEDULE_MAP = get_available_class(module=torch.optim.lr_scheduler,
+ class_name=torch.optim.lr_scheduler._LRScheduler)
+
+ @property
+ def optimizers(self):
+ return self._optimizers
+
+ @optimizers.setter
+ def optimizers(self, optimizers):
+ self._optimizers = optimizers
+
+ @property
+ def schedulers(self):
+ return self._schedulers
+
+ @schedulers.setter
+ def schedulers(self, schedulers):
+ self._schedulers = schedulers
+
+ @abc.abstractmethod
+ def configure_optimizers(self):
+ raise NotImplementedError
+
+ def parse_configure(self, **kwargs):
+ self.parse_optimizer(**kwargs)
+ self.parse_lr_schedule(**kwargs)
+ self.configure_optimizers()
+
+ def parse_optimizer(self, **kwargs):
+ default_config = dict(optimizer='Adam', lr=1e-3)
+ default_config.update(kwargs.get('opt_config', {}))
+ self.optimizer_config = default_config
+
+ def parse_lr_schedule(self, **kwargs):
+ default_config = dict(scheduler='ExponentialLR', gamma=math.pow(0.95, 0.001), last_epoch=-1)
+ default_config.update(kwargs.get('schedule_config', {}))
+ self.schedule_config = default_config
+
+ def __str__(self):
+ if 'optimizer_config' in self.__dict__:
+ opt_str = str(self.optimizer_config)
+ else:
+ opt_str = str('optimizer is empty...')
+
+ if 'schedule_config' in self.__dict__:
+ schedule_str = str(self.schedule_config)
+ else:
+ schedule_str = str('scheduler is empty...')
+ return "\n".join([opt_str, schedule_str])
diff --git a/idrlnet/pde.py b/idrlnet/pde.py
new file mode 100644
index 0000000..8bd901a
--- /dev/null
+++ b/idrlnet/pde.py
@@ -0,0 +1,91 @@
+"""Define PdeNode"""
+
+from typing import List, Dict
+from idrlnet.node import Node
+from idrlnet.torch_util import _replace_derivatives
+from idrlnet.header import DIFF_SYMBOL
+from idrlnet.variable import Variables
+
+__all__ = ['PdeNode', 'ExpressionNode']
+
+
+class PdeEvaluate:
+ """A wrapper for PdeNode.evaluate"""
+
+ def __init__(self, binding_pde):
+ self.binding_pde = binding_pde
+
+ def __call__(self, inputs: Variables) -> Variables:
+ result = Variables()
+ for node in self.binding_pde.sub_nodes:
+ sub_inputs = {k: v for k, v in Variables(inputs).items() if
+ k in node.inputs or k in node.derivatives}
+ r = node.evaluate(sub_inputs)
+ result.update(r)
+ return result
+
+
+class PdeNode(Node):
+ @property
+ def suffix(self) -> str:
+ return self._suffix
+
+ @suffix.setter
+ def suffix(self, suffix: str):
+ # todo: check suffix
+ self._suffix = suffix
+
+ @property
+ def equations(self) -> Dict:
+ return self._equations
+
+ @equations.setter
+ def equations(self, equations: Dict):
+ self._equations = equations
+
+ @property
+ def sub_nodes(self) -> List:
+ return self._sub_nodes
+
+ @sub_nodes.setter
+ def sub_nodes(self, sub_nodes: List):
+ self._sub_nodes = sub_nodes
+
+ def __init__(self, suffix: str = "", **kwargs):
+ if len(suffix) > 0:
+ self.suffix = '[' + kwargs['suffix'] + ']' # todo: check prefix
+ else:
+ self.suffix = ''
+ self.name = type(self).__name__ + self.suffix
+ self.evaluate = PdeEvaluate(self)
+
+ def make_nodes(self) -> None:
+ self.sub_nodes = []
+ free_symbols_set = set()
+ name_set = set()
+ for name, eq in self.equations.items():
+ torch_eq = _replace_derivatives(eq)
+ free_symbols = [x.name for x in torch_eq.free_symbols]
+ free_symbols_set.update(set(free_symbols))
+ name = name + self.suffix
+ node = Node.new_node(name, torch_eq, free_symbols)
+ name_set.update({name})
+ self.sub_nodes.append(node)
+ self.inputs = [x for x in free_symbols_set if DIFF_SYMBOL not in x]
+ self.derivatives = [x for x in free_symbols_set if DIFF_SYMBOL in x]
+ self.outputs = [x for x in name_set]
+
+ def __str__(self):
+ subnode_str = "\n\n".join(
+ str(sub_node) + "Equation: \n" + str(self.equations[sub_node.name]) for sub_node in self.sub_nodes)
+ return super().__str__() + "subnodes".center(30, '-') + '\n' + subnode_str
+
+
+# todo: test required
+class ExpressionNode(PdeNode):
+ def __init__(self, expression, name, **kwargs):
+ super().__init__(**kwargs)
+ self.equations = dict()
+ self.equations[name] = expression
+ self.name = name
+ self.make_nodes()
diff --git a/idrlnet/pde_op/__init__.py b/idrlnet/pde_op/__init__.py
new file mode 100644
index 0000000..f67cbe9
--- /dev/null
+++ b/idrlnet/pde_op/__init__.py
@@ -0,0 +1,2 @@
+from .equations import *
+from .operator import *
diff --git a/idrlnet/pde_op/equations.py b/idrlnet/pde_op/equations.py
new file mode 100644
index 0000000..028075e
--- /dev/null
+++ b/idrlnet/pde_op/equations.py
@@ -0,0 +1,152 @@
+"""Predefined equations
+
+"""
+from sympy import Function, Number, symbols
+
+from idrlnet.pde import PdeNode
+
+__all__ = ['DiffusionNode', 'NavierStokesNode', 'WaveNode', 'BurgersNode', 'SchrodingerNode', 'AllenCahnNode']
+
+
+def symbolize(s, input_variables=None):
+ if type(s) in (list, tuple):
+ return [symbolize(_s) for _s in s]
+ elif type(s) is str:
+ s = Function(s)(*input_variables)
+ elif type(s) in [float, int]:
+ s = Number(s)
+ return s
+
+
+class DiffusionNode(PdeNode):
+ def __init__(self, T='T', D='D', Q=0, dim=3, time=True, **kwargs):
+ super().__init__(**kwargs)
+ self.T = T
+ x, y, z, t = symbols('x y z t')
+ input_variables = {'x': x, 'y': y, 'z': z, 't': t}
+ assert type(T) == str, "T should be string"
+
+ T = symbolize(T, input_variables=input_variables)
+ D = symbolize(D, input_variables=input_variables)
+ Q = symbolize(Q, input_variables=input_variables)
+
+ self.equations = {'diffusion_' + self.T: -Q}
+ if time:
+ self.equations['diffusion_' + self.T] += T.diff(t)
+ coord = [x, y, z]
+ for i in range(dim):
+ s = coord[i]
+ self.equations['diffusion_' + self.T] -= (D * T.diff(s)).diff(s)
+ self.make_nodes()
+
+
+class NavierStokesNode(PdeNode):
+ def __init__(self, nu=0.1, rho=1., dim=2., time=False, **kwargs):
+ super().__init__(**kwargs)
+ self.dim = dim
+ assert self.dim in [2, 3], "dim should be 2 or 3"
+ self.time = time
+ x, y, z, t = symbols('x y z t')
+ input_variables = {'x': x, 'y': y, 'z': z, 't': t}
+ if self.dim == 2:
+ input_variables.pop('z')
+ if not self.time:
+ input_variables.pop('t')
+
+ u = symbolize('u', input_variables)
+ v = symbolize('v', input_variables)
+ w = symbolize('w', input_variables) if self.dim == 3 else Number(0)
+ p = symbolize('p', input_variables)
+ nu = symbolize(nu, input_variables)
+ rho = symbolize(rho, input_variables)
+ mu = rho * nu
+ self.equations = {'continuity': rho.diff(t) + (rho * u).diff(x) + (rho * v).diff(y) + (rho * w).diff(z),
+ 'momentum_x': ((rho * u).diff(t)
+ + (u * ((rho * u).diff(x)) + v * ((rho * u).diff(y)) + w * ((rho * u).diff(z)))
+ + p.diff(x)
+ - (mu * u.diff(x)).diff(x)
+ - (mu * u.diff(y)).diff(y)
+ - (mu * u.diff(z)).diff(z)),
+ 'momentum_y': ((rho * v).diff(t)
+ + (u * ((rho * v).diff(x)) + v * ((rho * v).diff(y)) + w * ((rho * v).diff(z)))
+ + p.diff(y)
+ - (mu * v.diff(x)).diff(x)
+ - (mu * v.diff(y)).diff(y)
+ - (mu * v.diff(z)).diff(z)), }
+
+ if self.dim == 3:
+ self.equations['momentum_z'] = ((rho * w).diff(t)
+ + (u * ((rho * w).diff(x)) + v * ((rho * w).diff(y)) + w * (
+ (rho * w).diff(z))) + p.diff(z) - (mu * w.diff(x)).diff(x) - (mu * w.diff(y)).diff(y) - (
+ mu * w.diff(z)).diff(z))
+ self.make_nodes()
+
+
+class WaveNode(PdeNode):
+ def __init__(self, u='u', c='c', dim=3, time=True, **kwargs):
+ super().__init__(**kwargs)
+ self.u = u
+ self.dim = dim
+ self.time = time
+ x, y, z, t = symbols('x y z t')
+ input_variables = {'x': x, 'y': y, 'z': z, 't': t}
+ assert self.dim in [1, 2, 3], "dim should be 1, 2 or 3."
+ if self.dim == 1:
+ input_variables.pop('y')
+ input_variables.pop('z')
+ elif self.dim == 2:
+ input_variables.pop('z')
+ if not self.time:
+ input_variables.pop('t')
+ assert type(u) == str, "u should be string"
+ u = symbolize(u, input_variables)
+ c = symbolize(c, input_variables)
+ self.equations = {'wave_equation': (u.diff(t, 2)
+ - (c ** 2 * u.diff(x)).diff(x)
+ - (c ** 2 * u.diff(y)).diff(y)
+ - (c ** 2 * u.diff(z)).diff(z))}
+ self.make_nodes()
+
+
+class BurgersNode(PdeNode):
+ def __init__(self, u: str = 'u', v='v'):
+ super().__init__()
+ x, t = symbols('x t')
+ input_variables = {'x': x, 't': t}
+
+ assert type(u) == str, "u needs to be string"
+ u = symbolize(u, input_variables)
+ v = symbolize(v, input_variables)
+
+ self.equations = {f'burgers_{str(u)}': (u.diff(t) + u * u.diff(x) - v * (u.diff(x)).diff(x))}
+ self.make_nodes()
+
+
+class SchrodingerNode(PdeNode):
+ def __init__(self, u='u', v='v', c=0.5):
+ super().__init__()
+ self.c = c
+ x, t = symbols('x t')
+ input_variables = {'x': x, 't': t}
+
+ assert type(u) == str, "u should be string"
+ u = symbolize(u, input_variables)
+
+ assert type(v) == str, "v should be string"
+ v = symbolize(v, input_variables)
+ self.equations = {'real': u.diff(t) + self.c * v.diff(x, 2) + (u ** 2 + v ** 2) * v,
+ 'imaginary': v.diff(t) - self.c * u.diff(x, 2) - (u ** 2 + v ** 2) * u}
+ self.make_nodes()
+
+
+class AllenCahnNode(PdeNode):
+ def __init__(self, u='u', gamma_1=0.0001, gamma_2=5):
+ super().__init__()
+ self.gama_1 = gamma_1
+ self.gama_2 = gamma_2
+ x, t = symbols('x t')
+ input_variables = {'x': x, 't': t}
+ assert type(u) == str, "u should be string"
+ u = symbolize(u, input_variables)
+ self.equations = {'AllenCahn_' + str(u): u.diff(t) - self.gama_1 * u.diff(x, 2) - self.gama_2 * (u - u ** 3)}
+ self.make_nodes()
diff --git a/idrlnet/pde_op/operator.py b/idrlnet/pde_op/operator.py
new file mode 100644
index 0000000..24f2e85
--- /dev/null
+++ b/idrlnet/pde_op/operator.py
@@ -0,0 +1,365 @@
+"""Operators in PDE
+
+"""
+import numpy as np
+import sympy as sp
+import torch
+from idrlnet.node import Node
+from idrlnet.pde import PdeNode
+from sympy import Symbol, Function, symbols, Number
+from typing import Union, List
+from idrlnet.torch_util import integral, _replace_derivatives, torch_lambdify
+from idrlnet.variable import Variables
+
+__all__ = ['NormalGradient', 'Difference', 'Derivative', 'Curl', 'Divergence', 'ICNode', 'Int1DNode', 'IntEq']
+
+
+class NormalGradient(PdeNode):
+ def __init__(self, T: Union[str, Symbol, float, int], dim=3, time=True):
+ super().__init__()
+ self.T = T
+ self.dim = dim
+ self.time = time
+
+ x, y, z, normal_x, normal_y, normal_z, t = symbols('x y z normal_x normal_y normal_z t')
+
+ input_variables = {'x': x,
+ 'y': y,
+ 'z': z,
+ 't': t}
+ if self.dim == 1:
+ input_variables.pop('y')
+ input_variables.pop('z')
+ elif self.dim == 2:
+ input_variables.pop('z')
+ if not self.time:
+ input_variables.pop('t')
+
+ T = Function(T)(*input_variables)
+
+ self.equations = {'normal_gradient_' + self.T: (normal_x * T.diff(x)
+ + normal_y * T.diff(y)
+ + normal_z * T.diff(z))}
+ self.make_nodes()
+
+
+class Difference(PdeNode):
+ def __init__(self, T: Union[str, Symbol, float, int], S: Union[str, Symbol, float, int], dim=3, time=True):
+ super().__init__()
+ self.T = T
+ self.S = S
+ self.dim = dim
+ self.time = time
+ x, y, z = symbols('x y z')
+ t = Symbol('t')
+ input_variables = {'x': x,
+ 'y': y,
+ 'z': z,
+ 't': t}
+ if self.dim == 1:
+ input_variables.pop('y')
+ input_variables.pop('z')
+ elif self.dim == 2:
+ input_variables.pop('z')
+ if not self.time:
+ input_variables.pop('t')
+
+ # variables to set the gradients (example Temperature)
+ T = Function(T)(*input_variables)
+ S = Function(S)(*input_variables)
+
+ # set equations
+ self.equations = {}
+ self.equations['difference_' + self.T + '_' + self.S] = T - S
+ self.make_nodes()
+
+
+class Derivative(PdeNode):
+ def __init__(self, T: Union[str, Symbol, float, int], p: Union[str, Symbol], S: Union[str, Symbol, float, int] = 0.,
+ dim=3, time=True):
+ super().__init__()
+ self.T = T
+ self.S = S
+ self.dim = dim
+ self.time = time
+ x, y, z = symbols('x y z')
+ t = Symbol('t')
+
+ input_variables = {'x': x,
+ 'y': y,
+ 'z': z,
+ 't': t}
+ if self.dim == 1:
+ input_variables.pop('y')
+ input_variables.pop('z')
+ elif self.dim == 2:
+ input_variables.pop('z')
+ if not self.time:
+ input_variables.pop('t')
+ if type(S) is str:
+ S = Function(S)(*input_variables)
+ elif type(S) in [float, int]:
+ S = Number(S)
+ if isinstance(p, str):
+ p = Symbol(p)
+ T = Function(T)(*input_variables)
+ self.equations = {}
+ if isinstance(S, Function):
+ self.equations['derivative_' + self.T + ':' + str(p) + '_' + str(self.S)] = T.diff(p) - S
+ else:
+ self.equations['derivative_' + self.T + ':' + str(p)] = T.diff(p) - S
+ self.make_nodes()
+
+
+class Curl(PdeNode):
+ def __init__(self, vector, curl_name=None):
+ super().__init__()
+ if curl_name is None:
+ curl_name = ['u', 'v', 'w']
+ x, y, z = symbols('x y z')
+ input_variables = {'x': x, 'y': y, 'z': z}
+
+ v_0 = vector[0]
+ v_1 = vector[1]
+ v_2 = vector[2]
+ if type(v_0) is str:
+ v_0 = Function(v_0)(*input_variables)
+ elif type(v_0) in [float, int]:
+ v_0 = Number(v_0)
+ if type(v_1) is str:
+ v_1 = Function(v_1)(*input_variables)
+ elif type(v_1) in [float, int]:
+ v_1 = Number(v_1)
+ if type(v_2) is str:
+ v_2 = Function(v_2)(*input_variables)
+ elif type(v_2) in [float, int]:
+ v_2 = Number(v_2)
+
+ curl_0 = v_2.diff(y) - v_1.diff(z)
+ curl_1 = v_0.diff(z) - v_2.diff(x)
+ curl_2 = v_1.diff(x) - v_0.diff(y)
+
+ self.equations = {}
+ self.equations[curl_name[0]] = curl_0
+ self.equations[curl_name[1]] = curl_1
+ self.equations[curl_name[2]] = curl_2
+
+
+class Divergence(PdeNode):
+ def __init__(self, vector, div_name='div_v'):
+ super().__init__()
+ x, y, z = symbols('x y z')
+
+ input_variables = {'x': x, 'y': y, 'z': z}
+
+ v_0 = vector[0]
+ v_1 = vector[1]
+ v_2 = vector[2]
+
+ if type(v_0) is str:
+ v_0 = Function(v_0)(*input_variables)
+ elif type(v_0) in [float, int]:
+ v_0 = Number(v_0)
+ if type(v_1) is str:
+ v_1 = Function(v_1)(*input_variables)
+ elif type(v_1) in [float, int]:
+ v_1 = Number(v_1)
+ if type(v_2) is str:
+ v_2 = Function(v_2)(*input_variables)
+ elif type(v_2) in [float, int]:
+ v_2 = Number(v_2)
+
+ self.equations = {}
+ self.equations[div_name] = v_0 + v_1 + v_2
+
+
+class ICNode(PdeNode):
+ def __init__(self, T: Union[str, Symbol, int, float, List[Union[str, Symbol, int, float]]], dim: int = 2,
+ time: bool = False,
+ reduce_name: str = None):
+ super().__init__()
+ if reduce_name is None:
+ reduce_name = str(T)
+ self.T = T
+ self.dim = dim
+ self.time = time
+ self.reduce_name = reduce_name
+
+ x, y, z = symbols('x y z')
+ normal_x = Symbol('normal_x')
+ normal_y = Symbol('normal_y')
+ normal_z = Symbol('normal_z')
+ area = Symbol('area')
+
+ t = Symbol('t')
+
+ input_variables = {'x': x,
+ 'y': y,
+ 'z': z,
+ 't': t}
+ if self.dim == 1:
+ input_variables.pop('y')
+ input_variables.pop('z')
+ elif self.dim == 2:
+ input_variables.pop('z')
+ if not self.time:
+ input_variables.pop('t')
+
+ def sympify_T(T: Union[str, Symbol, int, float, List[Union[str, Symbol, int, float]]]) -> Union[
+ Symbol, List[Symbol]]:
+ if isinstance(T, list):
+ return [sympify_T(_T) for _T in T]
+ elif type(T) is str:
+ T = Function(T)(*input_variables)
+ elif type(T) in [float, int]:
+ T = Number(T)
+ return T
+
+ T = sympify_T(T)
+ # set equations
+ self.equations = {}
+ if isinstance(T, list):
+ if self.dim == 3:
+ self.equations['integral_' + self.reduce_name] = integral((normal_x * T[0]
+ + normal_y * T[1]
+ + normal_z * T[2]) * area)
+ if self.dim == 2:
+ self.equations['integral_' + self.reduce_name] = integral((normal_x * T[0]
+ + normal_y * T[1]) * area)
+ else:
+ self.equations['integral_' + self.reduce_name] = integral(T * area)
+ self.make_nodes()
+
+
+class Int1DNode(PdeNode):
+ counter = 0
+
+ def __init__(self, expression, expression_name, lb, ub, var: Union[str, sp.Symbol] = 's', degree=20, **kwargs):
+ super().__init__(**kwargs)
+ x = sp.Symbol('x')
+ self.equations = {}
+ self.var = sp.Symbol(var) if isinstance(var, str) else var
+ self.degree = degree
+ quad_s, quad_w = np.polynomial.legendre.leggauss(self.degree)
+ self.quad_s = torch.tensor(quad_s, dtype=torch.float32)
+ self.quad_w = torch.tensor(quad_w, dtype=torch.float32)
+
+ if type(lb) is str:
+ self.lb = sp.Function(lb)(x)
+ elif type(lb) in [float, int]:
+ self.lb = sp.Number(lb)
+ else:
+ self.lb = lb
+
+ if type(ub) is str:
+ self.ub = sp.Function(ub)(x)
+ elif type(ub) in [float, int]:
+ self.ub = sp.Number(ub)
+ else:
+ self.ub = ub
+
+ if type(expression) in [float, int]:
+ self.equations[expression_name] = sp.Number(expression)
+ elif isinstance(expression, sp.Expr):
+ self.equations[expression_name] = expression
+ else:
+ raise
+
+ if 'funs' in kwargs.keys():
+ self.funs = kwargs['funs']
+ else:
+ self.funs = {}
+ self.computable_name = set(*[fun['output_map'].values() for _, fun in self.funs.items()])
+ self.fun_require_input = set(
+ *[set(fun['eval'].inputs) - set(fun['input_map'].keys()) for _, fun in self.funs.items()])
+
+ self.make_nodes()
+
+ def make_nodes(self) -> None:
+ self.sub_nodes = []
+ free_symbols_set = set()
+ name_set = set()
+ for name, eq in self.equations.items():
+ self.lb = _replace_derivatives(self.lb)
+ self.ub = _replace_derivatives(self.ub)
+ eq = _replace_derivatives(eq)
+ free_symbols_set.update(set(x.name for x in self.ub.free_symbols))
+ free_symbols_set.update(set(x.name for x in self.lb.free_symbols))
+ free_symbols_set.update(set(x.name for x in eq.free_symbols))
+ for ele in self.fun_require_input:
+ free_symbols_set.add(ele)
+ if self.var.name in free_symbols_set:
+ free_symbols_set.remove(self.var.name)
+
+ name = name + self.suffix
+ node = self.new_node(name, eq, list(free_symbols_set))
+ name_set.update({name})
+ self.sub_nodes.append(node)
+
+ self.inputs = [x for x in free_symbols_set if x not in self.funs.keys()]
+ self.derivatives = []
+ self.outputs = [x for x in name_set]
+
+ def new_node(self, name: str = None, tf_eq: sp.Expr = None, free_symbols: List[str] = None, *args, **kwargs):
+ out_symbols = [x for x in free_symbols if x not in self.funs.keys()]
+ lb_lambda = torch_lambdify(out_symbols, self.lb)
+ ub_lambda = torch_lambdify(out_symbols, self.ub)
+ eq_lambda = torch_lambdify([*free_symbols, self.var.name], tf_eq)
+ node = Node()
+ node.evaluate = IntEq(self, lb_lambda, ub_lambda, out_symbols, free_symbols, eq_lambda, name)
+ node.inputs = [x for x in free_symbols if x not in self.funs.keys()]
+ node.derivatives = []
+ node.outputs = [name]
+ node.name = name
+ return node
+
+
+class IntEq:
+ def __init__(self, binding_node, lb_lambda, ub_lambda, out_symbols, free_symbols, eq_lambda, name):
+ self.binding_node = binding_node
+ self.lb_lambda = lb_lambda
+ self.ub_lambda = ub_lambda
+ self.out_symbols = out_symbols
+ self.free_symbols = free_symbols
+ self.eq_lambda = eq_lambda
+ self.name = name
+
+ def __call__(self, var: Variables):
+ var = {k: v for k, v in var.items()}
+ lb_value = self.lb_lambda(**{k: v for k, v in var.items() if k in self.out_symbols})
+ ub_value = self.ub_lambda(**{k: v for k, v in var.items() if k in self.out_symbols})
+
+ xx = dict()
+ for syp in self.free_symbols:
+ if syp not in var.keys():
+ continue
+ value = var[syp]
+ _value = torch.ones_like(self.binding_node.quad_s) * value
+ _value = _value.reshape(-1, 1)
+ xx.update({syp: _value})
+
+ quad_w = (ub_value - lb_value) / 2 * self.binding_node.quad_w
+ quad_s = (self.binding_node.quad_s + 1) * (ub_value - lb_value) / 2 + lb_value
+ shape = quad_w.shape
+
+ quad_w = quad_w.reshape(-1, 1)
+ quad_s = quad_s.reshape(-1, 1)
+
+ new_var = dict()
+ for _, fun in self.binding_node.funs.items():
+ input_map = fun['input_map']
+ output_map = fun['output_map']
+ tmp_var = dict()
+ for k, v in xx.items():
+ tmp_var[k] = v
+ for k, v in input_map.items():
+ tmp_var[k] = quad_s
+ res = fun['eval'].evaluate(tmp_var)
+ for k, v in output_map.items():
+ res[v] = res.pop(k)
+ new_var.update(res)
+ xx.update(new_var)
+
+ values = quad_w * self.eq_lambda(**dict(**{self.binding_node.var.name: quad_s}, **xx))
+ values = values.reshape(shape)
+ return {self.name: values.sum(1, keepdim=True)}
diff --git a/idrlnet/receivers.py b/idrlnet/receivers.py
new file mode 100644
index 0000000..6f0e9e6
--- /dev/null
+++ b/idrlnet/receivers.py
@@ -0,0 +1,40 @@
+"""Concrete predefined callbacks"""
+
+import abc
+from enum import Enum
+from typing import Dict, List
+
+
+class Signal(Enum):
+ REGISTER = 'signal_register'
+ SOLVE_START = 'signal_solve_start'
+ TRAIN_PIPE_START = 'signal_train_pipe_start'
+ BEFORE_COMPUTE_LOSS = 'before_compute_loss'
+ AFTER_COMPUTE_LOSS = 'compute_loss'
+ BEFORE_BACKWARD = 'signal_before_backward'
+ TRAIN_PIPE_END = 'signal_train_pipe_end'
+ SOLVE_END = 'signal_solve_end'
+
+
+class Receiver(metaclass=abc.ABCMeta):
+ @abc.abstractmethod
+ def receive_notify(self, obj: object, message: Dict):
+ raise NotImplementedError('Method receive_notify() not implemented!')
+
+
+class Notifier:
+ @property
+ def receivers(self):
+ return self._receivers
+
+ @receivers.setter
+ def receivers(self, receivers: List[Receiver]):
+ self._receivers = receivers
+
+ def notify(self, obj: object, message: Dict):
+ for receiver in self.receivers[::-1]:
+ receiver.receive_notify(obj, message)
+
+ def register_receiver(self, receiver: Receiver):
+ self.receivers.append(receiver)
+ self.notify(self, message={Signal.REGISTER: receiver})
diff --git a/idrlnet/shortcut.py b/idrlnet/shortcut.py
new file mode 100644
index 0000000..88ed354
--- /dev/null
+++ b/idrlnet/shortcut.py
@@ -0,0 +1,13 @@
+"""shortcut for API"""
+from idrlnet.geo_utils import *
+from idrlnet.architecture import *
+from idrlnet.pde_op import *
+from idrlnet.net import NetNode
+from idrlnet.data import get_data_node, DataNode, get_data_nodes, datanode, SampleDomain
+from idrlnet.pde import ExpressionNode
+from idrlnet.solver import Solver
+from idrlnet.callbacks import GradientReceiver
+from idrlnet.receivers import Receiver, Signal
+from idrlnet.variable import Variables, export_var
+from idrlnet.header import logger
+from idrlnet import GPU_ENABLED
diff --git a/idrlnet/solver.py b/idrlnet/solver.py
new file mode 100644
index 0000000..e69aa74
--- /dev/null
+++ b/idrlnet/solver.py
@@ -0,0 +1,390 @@
+"""Solver"""
+
+from collections import ChainMap
+import torch
+import os
+import pathlib
+from typing import Dict, List, Union, Tuple, Optional, Callable
+from idrlnet.callbacks import SummaryReceiver, HandleResultReceiver
+from idrlnet.header import logger
+from idrlnet.optim import Optimizable
+from idrlnet.data import DataNode, SampleDomain
+from idrlnet.net import NetNode
+from idrlnet.receivers import Receiver, Notifier, Signal
+from idrlnet.variable import Variables, DomainVariables
+from idrlnet.graph import VertexTaskPipeline
+import idrlnet
+
+__all__ = ['Solver']
+
+
+class Solver(Notifier, Optimizable):
+ """Instances of the Solver class integrate configurations and handle the computation
+ operation during solving PINNs. One problem usually needs one instance to solve.
+
+ :param sample_domains: A tuple of geometry domains used to sample points for training of PINNs.
+ :type sample_domains: Tuple[DataNode, ...]
+ :param netnodes: A list of neural networks. Trainable computation nodes.
+ :type netnodes: List[NetNode]
+ :param pdes: A list of partial differential equations. Similar to net nodes, they can evaluateinputs and output
+ results. But they are not trainable.
+ :type pdes: Optional[List[PdeNode]]
+ :param network_dir: The directory used to automatically load and store ckpt files
+ :type network_dir: str
+ :param summary_dir: The directory is used for store information about tensorboard. If it is not specified,
+ it will be assigned to network_dir by default.
+ :type summary_dir: Optional[str]
+ :param max_iter: Max iteration the solver would run.
+ :type max_iter: int
+ :param save_freq: Frequency of saving ckpt.
+ :type save_freq: int
+ :param print_freq: Frequency of printing loss.
+ :type print_freq: int
+ :param loading: By default, it is true. It will try to load ckpt and continue previous training stage.
+ :type loading: bool
+ :param init_network_dirs: A list of directories for loading pre-trained networks.
+ :type init_network_dirs: List[str]
+ :param opt_config: Configure one optimizer for all trainable parameters. It is a wrapper of `torch.optim.Optimizer`.
+ One can specify any subclasses of `torch.optim.Optimizer` by
+ expanding the args like:
+
+ - `opt_config=dict(optimizer='Adam', lr=0.001)` **by default**.
+ - `opt_config=dict(optimizer='SGD', lr=0.01, momentum=0.9)`
+ - `opt_config=dict(optimizer='SparseAdam', lr=0.001, betas=(0.9, 0.999), eps=1e-08)`
+ Note that the opt is Case Sensitive.
+ :type opt_config: Dict
+ :param schedule_config: Configure one lr scheduler for the optimizer. It is a wrapper of
+
+ - `torch.optim.lr_scheduler._LRScheduler`. One can specify any subclasses of the class lke:
+ - `schedule_config=dict(scheduler='ExponentialLR', gamma=math.pow(0.95, 0.001))`
+ - `schedule_config=dict(scheduler='StepLR', step_size=30, gamma=0.1)`
+ Note that the scheduler is Case Sensitive.
+ :type schedule_config: Dict
+ :param result_dir: save the final training domain data. defaults to 'train_domain/results'
+ :type result_dir: str
+ :param kwargs:
+ """
+
+ def __init__(self, sample_domains: Tuple[Union[DataNode, SampleDomain], ...],
+ netnodes: List[NetNode],
+ pdes: Optional[List] = None,
+ network_dir: str = './network_dir',
+ summary_dir: Optional[str] = None,
+ max_iter: int = 1000,
+ save_freq: int = 100,
+ print_freq: int = 10,
+ loading: bool = True,
+ init_network_dirs: Optional[List[str]] = None,
+ opt_config: Dict = None,
+ schedule_config: Dict = None,
+ result_dir='train_domain/results',
+ **kwargs):
+
+ self.network_dir: str = network_dir
+ self.domain_losses = {domain.name: domain.loss_fn for domain in sample_domains}
+ self.netnodes: List[NetNode] = netnodes
+ if init_network_dirs:
+ self.init_network_dirs = init_network_dirs
+ else:
+ self.init_network_dirs = []
+ self.init_load()
+
+ self.pdes: List = [] if pdes is None else pdes
+ pathlib.Path(self.network_dir).mkdir(parents=True, exist_ok=True)
+ self.global_step = 0
+ self.max_iter = max_iter
+ self.save_freq = save_freq
+ self.print_freq = print_freq
+ try:
+ self.parse_configure(**{**({"opt_config": opt_config} if opt_config is not None else {}),
+ **({"schedule_config": schedule_config} if schedule_config is not None else {})})
+ except Exception:
+ logger.error("Optimizer configuration failed")
+ raise
+
+ if loading:
+ try:
+ self.load()
+ except:
+ pass
+ self.sample_domains: Tuple[DataNode, ...] = sample_domains
+ self.summary_dir = self.network_dir if summary_dir is None else summary_dir
+ self.receivers: List[Receiver] = [SummaryReceiver(self.summary_dir), HandleResultReceiver(result_dir)]
+
+ @property
+ def network_dir(self):
+ return self._network_dir
+
+ @network_dir.setter
+ def network_dir(self, network_dir):
+ self._network_dir = network_dir
+
+ @property
+ def sample_domains(self):
+ return self._sample_domains
+
+ @sample_domains.setter
+ def sample_domains(self, sample_domains):
+ self._sample_domains = sample_domains
+ self._generate_dict_index()
+ self.generate_computation_pipeline()
+
+ @property
+ def trainable_parameters(self) -> List[torch.nn.parameter.Parameter]:
+ """Return trainable parameters in netnodes. Parameters in netnodes with ``is_reference=True``
+ or ``fixed=True`` will not be returned.
+ :return: A list of trainable parameters.
+ :rtype: List[torch.nn.parameter.Parameter]
+ """
+ parameter_list = list(map(lambda _net_node: {'params': _net_node.net.parameters()},
+ filter(lambda _net_node: not _net_node.is_reference and (not _net_node.fixed),
+ self.netnodes)))
+ if len(parameter_list) == 0:
+ '''To make sure successful initialization of optimizers.'''
+ parameter_list = [torch.nn.parameter.Parameter(data=torch.Tensor([0.]), requires_grad=True)]
+ logger.warning("No trainable parameters found!")
+ return parameter_list
+
+ @property
+ def summary_receiver(self) -> SummaryReceiver:
+ try:
+ summary_receiver = self.receivers[0]
+ assert isinstance(summary_receiver, SummaryReceiver)
+ except IndexError:
+ raise
+ return summary_receiver
+
+ def __str__(self):
+ """return sovler information, it will return components recursively"""
+ str_list = []
+ str_list.append("nets: \n")
+ str_list.append(''.join([str(net) for net in self.netnodes]))
+ str_list.append("domains: \n")
+ str_list.append(''.join([str(domain) for domain in self.sample_domains]))
+ str_list.append('\n')
+ str_list.append('optimizer config:\n')
+ for i, _class in enumerate(type(self).mro()):
+ if _class == Optimizable:
+ str_list.append(super(type(self).mro()[i - 1], self).__str__())
+ return ''.join(str_list)
+
+ def set_param_ranges(self, param_ranges: Dict):
+ for domain in self.sample_domains:
+ domain.sample_fn.param_ranges = param_ranges
+
+ def set_domain_parameter(self, domain_name: str, parameter_dict: dict):
+ domain = self.get_sample_domain(domain_name)
+ for key, value in parameter_dict.items():
+ domain.sample_fn.__dict__[key] = value
+
+ def get_domain_parameter(self, domain_name: str, parameter: str):
+ return self.get_sample_domain(domain_name).sample_fn.__dict__[parameter]
+
+ def get_sample_domain(self, name: str) -> DataNode:
+ for value in self.sample_domains:
+ if value.name == name:
+ return value
+ raise KeyError(f'domain {name} not exist!')
+
+ def generate_computation_pipeline(self):
+ """Generate computation pipeline for all domains.
+ The change of `self.sample_domains` will triger this method.
+ """
+ samples = self.sample_variables_from_domains()
+ in_var, true_out, lambda_out = self.generate_in_out_dict(samples)
+ self.vertex_pipelines = {}
+ for domain_name, var in in_var.items():
+ logger.info(f"Constructing computation graph for domain <{domain_name}>")
+ self.vertex_pipelines[domain_name] = VertexTaskPipeline(self.netnodes + self.pdes, var,
+ self.outvar_dict_index[domain_name])
+ self.vertex_pipelines[domain_name].display(
+ os.path.join(self.network_dir, f'{domain_name}_{self.global_step}.png'))
+
+ def forward_through_all_graph(self, invar_dict: DomainVariables,
+ req_outvar_dict_index: Dict[str, List[str]]) -> DomainVariables:
+ outvar_dict = {}
+ for (key, req_outvar_names) in req_outvar_dict_index.items():
+ outvar_dict[key] = self.vertex_pipelines[key].forward_pipeline(invar_dict[key], req_outvar_names)
+ return outvar_dict
+
+ def append_sample_domain(self, datanode):
+ self.sample_domains = self.sample_domains + (datanode,)
+
+ def _generate_dict_index(self) -> None:
+ self.invar_dict_index = {domain.name: domain.inputs for domain in self.sample_domains}
+ self.outvar_dict_index = {domain.name: domain.outputs for domain in self.sample_domains}
+ self.lambda_dict_index = {domain.name: domain.lambda_outputs for domain in self.sample_domains}
+
+ def generate_in_out_dict(self, samples: DomainVariables) -> \
+ Tuple[DomainVariables, DomainVariables, DomainVariables]:
+ invar_dict = {}
+ for domain, variable in samples.items():
+ inner = {}
+ for key, val in variable.items():
+ if key in self.invar_dict_index[domain]:
+ inner[key] = val
+ invar_dict[domain] = inner
+
+ invar_dict = {
+ domain: Variables({key: val for key, val in variable.items() if key in self.invar_dict_index[domain]}) for
+ domain, variable in samples.items()}
+ outvar_dict = {
+ domain: Variables({key: val for key, val in variable.items() if key in self.outvar_dict_index[domain]}) for
+ domain, variable in samples.items()}
+ lambda_dict = {
+ domain: Variables({key: val for key, val in variable.items() if key in self.lambda_dict_index[domain]}) for
+ domain, variable in samples.items()}
+ return invar_dict, outvar_dict, lambda_dict
+
+ def solve(self):
+ """After the solver instance is initialized, the method could be called to solve the entire problem.
+ """
+ self.notify(self, message={Signal.SOLVE_START: 'default'})
+ while self.global_step < self.max_iter:
+ loss = self.train_pipe()
+ if self.global_step % self.print_freq == 0:
+ logger.info("Iteration: {}, Loss: {}".format(self.global_step, loss))
+ if self.global_step % self.save_freq == 0:
+ self.save()
+ logger.info("Training Stage Ends")
+ self.notify(self, message={Signal.SOLVE_END: 'default'})
+
+ def train_pipe(self):
+ """Sample once; calculate the loss once; backward propagation once
+ :return: None
+ """
+ self.notify(self, message={Signal.TRAIN_PIPE_START: 'defaults'})
+ for opt in self.optimizers:
+ opt.zero_grad()
+ samples = self.sample_variables_from_domains()
+ in_var, true_out, lambda_out = self.generate_in_out_dict(samples)
+ pred_out_sample = self.forward_through_all_graph(in_var, self.outvar_dict_index)
+ try:
+ loss = self.compute_loss(in_var, pred_out_sample, true_out, lambda_out)
+ except RuntimeError:
+ raise
+ self.notify(self, message={Signal.BEFORE_BACKWARD: 'defaults'})
+ loss.backward()
+ for opt in self.optimizers:
+ opt.step()
+ self.global_step += 1
+
+ for scheduler in self.schedulers:
+ scheduler.step(self.global_step)
+ self.notify(self, message={Signal.TRAIN_PIPE_END: 'defaults'})
+ return loss
+
+ def compute_loss(self, in_var: DomainVariables, pred_out_sample: DomainVariables,
+ true_out: DomainVariables,
+ lambda_out: DomainVariables) -> torch.Tensor:
+ """Compute the total loss in one epoch.
+
+ """
+ diff = dict()
+ for domain_name, domain_val in true_out.items():
+ if len(domain_val) == 0:
+ continue
+ diff[domain_name] = pred_out_sample[domain_name] - domain_val.to_torch_tensor_()
+ diff[domain_name].update(lambda_out[domain_name])
+ diff[domain_name].update(area=in_var[domain_name]['area'])
+
+ for domain, var in diff.items():
+ lambda_diff = dict()
+ for constraint, _ in var.items():
+ if 'lambda_' + constraint in in_var[domain].keys():
+ lambda_diff['lambda_' + constraint] = in_var[domain]['lambda_' + constraint]
+ var.update(lambda_diff)
+
+ self.loss_component = Variables(
+ ChainMap(
+ *[diff[domain_name].weighted_loss(f"{domain_name}_loss",
+ loss_function=self.domain_losses[domain_name]) for
+ domain_name, domain_val in
+ diff.items()]))
+ self.notify(self, message={Signal.BEFORE_COMPUTE_LOSS: {**self.loss_component}})
+ loss = sum({domain_name: self.get_sample_domain(domain_name).sigma * self.loss_component[f"{domain_name}_loss"] for
+ domain_name in diff}.values())
+ self.notify(self, message={Signal.AFTER_COMPUTE_LOSS: {**self.loss_component, **{'total_loss': loss}}})
+ return loss
+
+ def infer_step(self, domain_attr: Dict[str, List[str]]) -> DomainVariables:
+ """Specify a domain and required fields for inference.
+ :param domain_attr: A map from a domain name to the list of required outputs on the domain.
+ :type domain_attr: Dict[str, List[str]]
+ :return: A dict of variables which are required.
+ :rtype: Dict[str, Variables]
+ """
+ samples = self.sample_variables_from_domains()
+ in_var, true_out, lambda_out = self.generate_in_out_dict(samples)
+ pred_out_sample = self.forward_through_all_graph(in_var, domain_attr)
+ return pred_out_sample
+
+ def sample_variables_from_domains(self) -> DomainVariables:
+ return {data_node.name: data_node.sample() for data_node in self.sample_domains}
+
+ def save(self):
+ """Save parameters of netnodes and the global step to `model.ckpt`.
+ """
+ save_path = os.path.join(self.network_dir, 'model.ckpt')
+ logger.info("save to path: {}".format(os.path.abspath(save_path)))
+ save_dict = {f"{net_node.name}_dict": net_node.state_dict() for net_node in
+ filter(lambda _net: not _net.is_reference, self.netnodes)}
+ for i, opt in enumerate(self.optimizers):
+ save_dict['optimizer_{}_dict'.format(i)] = opt.state_dict()
+ save_dict['global_step'] = self.global_step
+ torch.save(save_dict, save_path)
+
+ def init_load(self):
+ for network_dir in self.init_network_dirs:
+ save_path = os.path.join(network_dir, 'model.ckpt')
+ save_dict = torch.load(save_path)
+ for net_node in self.netnodes:
+ if f"{net_node.name}_dict" in save_dict.keys() and not net_node.is_reference:
+ net_node.load_state_dict(save_dict[f"{net_node.name}_dict"])
+ logger.info(f"Successfully loading initialization {net_node.name}.")
+
+ def load(self):
+ """Load parameters of netnodes and the global step from `model.ckpt`.
+ """
+ save_path = os.path.join(self.network_dir, 'model.ckpt')
+ if not idrlnet.GPU_ENABLED:
+ save_dict = torch.load(save_path, map_location=torch.device('cpu'))
+ else:
+ save_dict = torch.load(save_path)
+ # todo: save on CPU, load on GPU
+ for i, opt in enumerate(self.optimizers):
+ opt.load_state_dict(save_dict['optimizer_{}_dict'.format(i)])
+ self.global_step = save_dict['global_step']
+ for net_node in self.netnodes:
+ if f"{net_node.name}_dict" in save_dict.keys() and not net_node.is_reference:
+ net_node.load_state_dict(save_dict[f"{net_node.name}_dict"])
+ logger.info(f"Successfully loading {net_node.name}.")
+
+ def configure_optimizers(self):
+ """
+ Call interfaces of ``Optimizable``
+ """
+ opt = self.optimizer_config['optimizer']
+ if isinstance(opt, str) and opt in Optimizable.OPTIMIZER_MAP:
+ opt = Optimizable.OPTIMIZER_MAP[opt](self.trainable_parameters,
+ **{k: v for k, v in self.optimizer_config.items() if k != 'optimizer'})
+ elif isinstance(opt, Callable):
+ opt = opt
+ else:
+ raise NotImplementedError(
+ 'The optimizer is not implemented. You may use one of the following optimizer:\n' + '\n'.join(
+ Optimizable.OPTIMIZER_MAP.keys()) + '\n Example: opt_config=dict(optimizer="Adam", lr=1e-3)')
+
+ lr_scheduler = self.schedule_config['scheduler']
+ if isinstance(lr_scheduler, str) and lr_scheduler in Optimizable.SCHEDULE_MAP:
+ lr_scheduler = Optimizable.SCHEDULE_MAP[lr_scheduler](opt,
+ **{k: v for k, v in self.schedule_config.items() if
+ k != 'scheduler'})
+ elif isinstance(lr_scheduler, Callable):
+ lr_scheduler = lr_scheduler
+ else:
+ raise NotImplementedError(
+ 'The scheduler is not implemented. You may use one of the following scheduler:\n' + '\n'.join(
+ Optimizable.SCHEDULE_MAP.keys()) + '\n Example: schedule_config=dict(scheduler="ExponentialLR", gamma=0.999')
+ self.optimizers = [opt]
+ self.schedulers = [lr_scheduler]
diff --git a/idrlnet/torch_util.py b/idrlnet/torch_util.py
new file mode 100644
index 0000000..0be76b5
--- /dev/null
+++ b/idrlnet/torch_util.py
@@ -0,0 +1,102 @@
+"""
+conversion utils for sympy expression and torch functions.
+todo: replace sampling method in GEOMETRY
+"""
+
+from sympy import lambdify, Symbol, Derivative, Function, Basic
+from sympy.utilities.lambdify import implemented_function
+from sympy.printing.str import StrPrinter
+import torch
+from idrlnet.header import DIFF_SYMBOL
+from functools import reduce
+
+__all__ = ['integral', 'torch_lambdify']
+
+
+def integral_fun(x):
+ if isinstance(x, torch.Tensor):
+ return torch.sum(input=x, dim=0, keepdim=True) * torch.ones_like(x)
+ return x
+
+
+integral = implemented_function('integral', lambda x: integral_fun(x))
+
+
+def torch_lambdify(r, f, *args, **kwargs):
+ try:
+ f = float(f)
+ except:
+ pass
+ if isinstance(f, (float, int, bool)): # constant function
+
+ def loop_lambda(constant):
+ return lambda **x: torch.zeros_like(next(iter(x.items()))[1]) + constant
+
+ lambdify_f = loop_lambda(f)
+ else:
+ lambdify_f = lambdify([k for k in r], f, [TORCH_SYMPY_PRINTER], *args, **kwargs)
+ # lambdify_f = lambdify([k for k in r], f, *args, **kwargs)
+ return lambdify_f
+
+
+# todo: more functions
+TORCH_SYMPY_PRINTER = {
+ 'sin': torch.sin,
+ 'cos': torch.cos,
+ 'tan': torch.tan,
+ 'exp': torch.exp,
+ 'sqrt': torch.sqrt,
+ 'Abs': torch.abs,
+ 'tanh': torch.tanh,
+ 'DiracDelta': torch.zeros_like,
+ 'Heaviside': lambda x: torch.heaviside(x, torch.tensor([0.])),
+ 'amin': lambda x: reduce(lambda y, z: torch.minimum(y, z), x),
+ 'amax': lambda x: reduce(lambda y, z: torch.maximum(y, z), x),
+ 'Min': lambda *x: reduce(lambda y, z: torch.minimum(y, z), x),
+ 'Max': lambda *x: reduce(lambda y, z: torch.maximum(y, z), x),
+ 'equal': lambda x, y: torch.isclose(x, y),
+ 'Xor': torch.logical_xor,
+ 'log': torch.log,
+ 'sinh': torch.sinh,
+ 'cosh': torch.cosh,
+ 'asin': torch.arcsin,
+ 'acos': torch.arccos,
+ 'atan': torch.arctan,
+}
+
+
+def _reduce_sum(x: torch.Tensor):
+ return torch.sum(x, dim=0, keepdim=True)
+
+
+def _replace_derivatives(expr):
+ while len(expr.atoms(Derivative)) > 0:
+ deriv = expr.atoms(Derivative).pop()
+ expr = expr.subs(deriv, Function(str(deriv))(*deriv.free_symbols))
+ while True:
+ try:
+ custom_fun = {_fun for _fun in expr.atoms(Function) if
+ (_fun.class_key()[1] == 0) and (not _fun.class_key()[2] == 'integral')
+ }.pop()
+ new_symbol_name = str(custom_fun)
+ expr = expr.subs(custom_fun, Symbol(new_symbol_name))
+ except KeyError:
+ break
+ return expr
+
+
+class UnderlineDerivativePrinter(StrPrinter):
+ def _print_Function(self, expr):
+ return expr.func.__name__
+
+ def _print_Derivative(self, expr):
+ return "".join([str(expr.args[0].func)] + [order * (DIFF_SYMBOL + str(key)) for key, order in expr.args[1:]])
+
+
+def sstr(expr, **settings):
+ p = UnderlineDerivativePrinter(settings)
+ s = p.doprint(expr)
+ return s
+
+
+Basic.__str__ = lambda self: sstr(self, order=None)
diff --git a/idrlnet/variable.py b/idrlnet/variable.py
new file mode 100644
index 0000000..82514f5
--- /dev/null
+++ b/idrlnet/variable.py
@@ -0,0 +1,235 @@
+"""Define variables, intermediate data format for the package."""
+
+import torch
+import itertools
+from typing import List, Dict
+import numpy as np
+import os
+from pyevtk.hl import pointsToVTK
+import pathlib
+import enum
+from typing import Union
+from collections import defaultdict
+import pandas as pd
+from idrlnet.header import DIFF_SYMBOL
+
+__all__ = ['Loss', 'Variables', 'DomainVariables', 'export_var']
+
+
+class Loss(enum.Enum):
+ """Enumerate loss functions"""
+
+ L1 = 'L1'
+ square = 'square'
+
+
+class LossFunction:
+ """Manage loss functions"""
+
+ @staticmethod
+ def weighted_loss(variables, loss_function, name):
+ if loss_function == Loss.L1.name or loss_function == Loss.L1:
+ return LossFunction.weighted_L1_loss(variables, name=name)
+ elif loss_function == Loss.square.name or loss_function == Loss.square:
+ return LossFunction.weighted_square_loss(variables, name=name)
+ raise NotImplementedError(f"loss function {loss_function} is not defined!")
+
+ @staticmethod
+ def weighted_L1_loss(variables: 'Variables', name: str) -> 'Variables':
+ loss = 0.
+ for key, val in variables.items():
+ if key.startswith("lambda_") or key == 'area':
+ continue
+ elif "lambda_" + key in variables.keys():
+ loss += torch.sum((torch.abs(val)) * variables["lambda_" + key] * variables["area"])
+ else:
+ loss += torch.sum((torch.abs(val)) * variables["area"])
+ return Variables({name: loss})
+
+ @staticmethod
+ def weighted_square_loss(variables: 'Variables', name: str) -> 'Variables':
+ loss = 0.
+ for key, val in variables.items():
+ if key.startswith("lambda_") or key == 'area':
+ continue
+ elif "lambda_" + key in variables.keys():
+ loss += torch.sum((val ** 2) * variables["lambda_" + key] * variables["area"])
+ else:
+ loss += torch.sum((val ** 2) * variables["area"])
+ return Variables({name: loss})
+
+
+class Variables(dict):
+ def __sub__(self, other: 'Variables') -> 'Variables':
+ return Variables(
+ {key: (self[key] if key in self else 0) - (other[key] if key in other else 0) for key in {**self, **other}})
+
+ def weighted_loss(self, name: str, loss_function: Union[Loss, str]) -> 'Variables':
+ """Regard the variable as residuals and reduce to a weighted_loss."""
+
+ return LossFunction.weighted_loss(variables=self, loss_function=loss_function, name=name)
+
+ def subset(self, subset_keys: List[str]) -> 'Variables':
+ """Construct a new variable with subset references"""
+
+ return Variables({name: self[name] for name in subset_keys if name in self})
+
+ def to_torch_tensor_(self) -> 'Variables[str, torch.Tensor]':
+ """Convert the variables to torch.Tensor"""
+
+ for key, val in self.items():
+ if not isinstance(val, torch.Tensor):
+ self[key] = torch.Tensor(val)
+ if (not key.startswith('lambda_')) and (not key == 'area'):
+ self[key].requires_grad_()
+ return self
+
+ def to_ndarray_(self) -> 'Variables[str, np.ndarray]':
+ """convert to a numpy based variables"""
+
+ for key, val in self.items():
+ if isinstance(val, torch.Tensor):
+ self[key] = val.detach().cpu().numpy()
+ return self
+
+ def to_ndarray(self) -> 'Variables[str, np.ndarray]':
+ """Return a new numpy based variables"""
+
+ new_var = Variables()
+ for key, val in self.items():
+ if isinstance(val, torch.Tensor):
+ new_var[key] = val.detach().cpu().numpy()
+ else:
+ new_var[key] = val
+ return new_var
+
+ def to_dataframe(self) -> pd.DataFrame:
+ """merge to a pandas.DataFrame"""
+
+ np_var = self.to_ndarray()
+ keys, values = list(zip(*[(key, value) for key, value in np_var.items()]))
+ values = np.concatenate([value for value in values], axis=-1)
+ df = pd.DataFrame(data=values, columns=keys)
+ return df
+
+ def merge_tensor(self) -> torch.Tensor:
+ """merge tensors in the Variable"""
+
+ variable_list = [value for _, value in self.items()]
+ variable_tensor = torch.cat(variable_list, dim=-1)
+ return variable_tensor
+
+ @classmethod
+ def from_tensor(cls, tensor: torch.Tensor, variable_names: List[str]):
+ """Construct Variables from torch.Tensor"""
+
+ split_tensor = torch.split(tensor, 1, dim=-1)
+ assert len(variable_names) == len(split_tensor)
+ variables = cls()
+ for name, var_t in zip(variable_names, split_tensor):
+ variables[name] = var_t
+ return variables
+
+ def differentiate_one_step_(self: 'Variables', independent_var: 'Variables', required_derivatives: List[str]):
+ """One order of derivatives will be computed towards the required_derivatives."""
+
+ required_derivatives = [d for d in required_derivatives if d not in self]
+ required_derivatives_set = set(
+ tuple(required_derivative.split(DIFF_SYMBOL)) for required_derivative in required_derivatives)
+ dependent_var_set = set(tuple(dv.split(DIFF_SYMBOL)) for dv in self.keys())
+ computable_derivative_dict = defaultdict(set)
+ for dv, rd in itertools.product(dependent_var_set, required_derivatives_set):
+ if len(rd) > len(dv) and rd[:len(dv)] == dv and rd[:len(dv) + 1] not in dependent_var_set:
+ computable_derivative_dict[rd[len(dv)]].add(DIFF_SYMBOL.join(dv))
+ derivative_variables = Variables()
+ for key, value in computable_derivative_dict.items():
+ for v in value:
+ f__x = torch.autograd.grad(self[v],
+ independent_var[key],
+ grad_outputs=torch.ones_like(self[v]),
+ retain_graph=True,
+ create_graph=True,
+ allow_unused=True)[0]
+ if f__x is not None:
+ f__x.requires_grad_()
+ else:
+ f__x = torch.zeros_like(self[v], requires_grad=True)
+ derivative_variables[DIFF_SYMBOL.join([v, key])] = f__x
+ self.update(derivative_variables)
+
+ def differentiate_(self: 'Variables', independent_var: 'Variables', required_derivatives: List[str]):
+ """Derivatives will be computed towards the required_derivatives"""
+
+ n_keys = 0
+ new_keys = len(self.keys())
+ while new_keys != n_keys:
+ n_keys = new_keys
+ self.differentiate_one_step_(independent_var, required_derivatives)
+ new_keys = len(self.keys())
+
+ @staticmethod
+ def var_differentiate_one_step(dependent_var: 'Variables', independent_var: 'Variables',
+ required_derivatives: List[str]):
+ """Perform one step of differentiate towards the required_derivatives"""
+
+ dependent_var.differentiate_one_step_(independent_var, required_derivatives)
+
+ def to_csv(self, filename: str) -> None:
+ """Export variable to csv"""
+
+ if not filename.endswith('.csv'):
+ filename += '.csv'
+ df = self.to_dataframe()
+ df.to_csv(filename, index=False)
+
+ def to_vtu(self, filename: str, coordinates=None) -> None:
+ """Export variable to vtu"""
+
+ coordinates = ['x', 'y', 'z'] if coordinates is None else coordinates
+ shape = 0
+ for axis in coordinates:
+ if axis not in self.keys():
+ self[axis] = np.zeros_like(next(iter(self.values())))
+ else:
+ shape = (len(self[axis]), 1)
+ for key, value in self.items():
+ if value.shape == (1, 1):
+ self[key] = np.ones(shape) * value
+ self[key] = np.asarray(self[key], dtype=np.float64)
+ pointsToVTK(filename,
+ self[coordinates[0]][:, 0].copy(),
+ self[coordinates[1]][:, 0].copy(),
+ self[coordinates[2]][:, 0].copy(),
+ data={key: value[:, 0].copy() for key, value in self.items()})
+
+ def save(self, path, formats=None):
+ """Export variable to various formats"""
+
+ if formats is None:
+ formats = ['np', 'csv', 'vtu']
+ np_var = self.to_ndarray()
+ if 'np' in formats:
+ np.savez(path, **np_var)
+ if 'csv' in formats:
+ np_var.to_csv(path)
+ if 'vtu' in formats:
+ np_var.to_vtu(filename=path)
+
+ @staticmethod
+ def cat(*var_list) -> 'Variables':
+ """todo: catenate in var list"""
+ return Variables()
+
+
+DomainVariables = Dict[str, Variables]
+
+
+def export_var(domain_var: DomainVariables, path='./inference_domain/results', formats=None):
+ """Export a dict of variables to ``csv``, ``vtu`` or ``npz``."""
+
+ if formats is None:
+ formats = ['csv', 'vtu', 'np']
+ path = pathlib.Path(path)
+ path.mkdir(exist_ok=True, parents=True)
+ for key in domain_var.keys():
+ domain_var[key].save(os.path.join(path, f'{key}'), formats)
diff --git a/requirements.txt b/requirements.txt
new file mode 100644
index 0000000..69cf75b
--- /dev/null
+++ b/requirements.txt
@@ -0,0 +1,21 @@
+transforms3d
+typing
+numpy
+keras
+h5py
+pandas
+zipfile36
+scikit-optimize
+pytest
+sphinx
+matplotlib
+myst_parser
+sphinx_markdown_parser
+sphinx_rtd_theme==0.5.2
+tensorboard==2.4.1
+sympy==1.5.1
+pyevtk==1.1.1
+flask==1.1.2
+requests==2.25.0
+torch==1.7.1
+networkx==2.5.1
\ No newline at end of file
diff --git a/setup.py b/setup.py
new file mode 100644
index 0000000..faba612
--- /dev/null
+++ b/setup.py
@@ -0,0 +1,22 @@
+import setuptools
+
+with open("README.md", "r") as fh:
+ long_description = fh.read()
+
+setuptools.setup(
+ name="idrlnet", # Replace with your own username
+ version="0.0.1",
+ author="Intelligent Design & Robust Learning lab",
+ author_email="weipeng@deepinfar.cn",
+ description="IDRLnet",
+ long_description=long_description,
+ long_description_content_type="text/markdown",
+ url="https://github.com/idrl-lab/idrlnet",
+ packages=setuptools.find_packages(),
+ classifiers=[
+ "Programming Language :: Python :: 3",
+ "License :: OSI Approved :: MIT License",
+ "Operating System :: OS Independent",
+ ],
+ python_requires='>=3.6',
+)
\ No newline at end of file